

前言:本文仿真模型基于SIMPLIS 8.0仿真環境。
上篇文章講到了CMC的LLC控制器中最為關鍵的方波振蕩器的仿真模型實現(傳送門在此),下文將繼續講訴CMC模型中的其它功能組成以及VMC的仿真模型搭建。
斜率補償部分
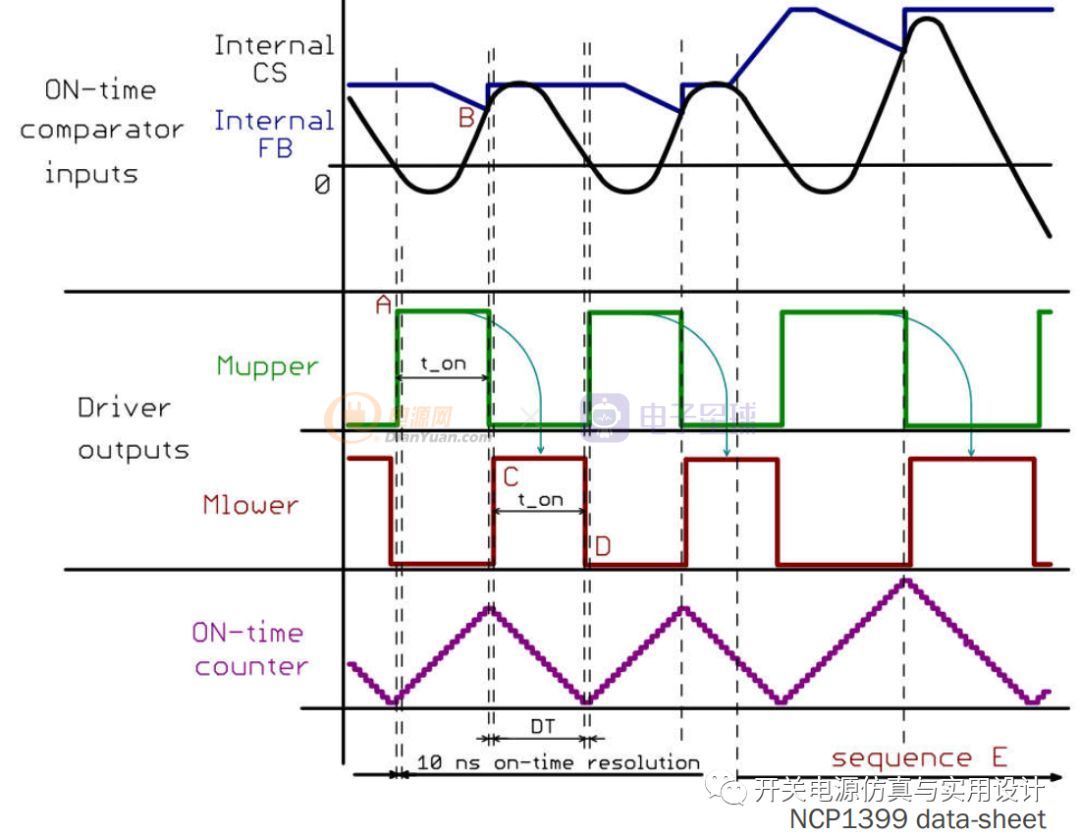
諧振拓撲工作在頻率調制時,占空比為對稱方波,高低端驅動各為50%。對于峰值電流模式的控制來講,占空比高于50%會存在不穩定的情況,所以在NCP1399內部也帶了斜率補償器。下圖是斜率補償的實現示意圖,可見在高端開關導通后,諧振電流(黑色)開始上升,內部反饋電壓與負向的斜坡電壓疊加(藍色)。使ON-time comparator本該是在諧振電流正弦波峰值處發出關斷信號,而提前關閉開關。因為反饋電壓減去負向斜坡電壓后,會比沒有負向疊加斜坡時提前發出關斷信號。
關于斜率補償在CMC的LLC控制器中的真正用意在數據手冊中并里面沒有寫出來,但是我覺得可能會有這么幾個作用:
-
減弱大動態響應切換時諧振電流的電流應力,提高系統穩定性。當負載從較低切到重載時,反饋環會輸出正向最大值,在沒有負向斜坡補償的情況時需要諧振電流上升到非常高的值。就需要開通非常長的ON time時間,這可能會產生非常高的諧振電流尖峰(因為開關頻率突然變化很大),對開關器件的可靠性造成了影響。為了減緩重負載切換時的諧振電流峰值,通過在反饋上疊加負向斜坡電壓后,讓本來要上升到非常高的諧振電流得以提前關斷,減輕了器件應力。
-
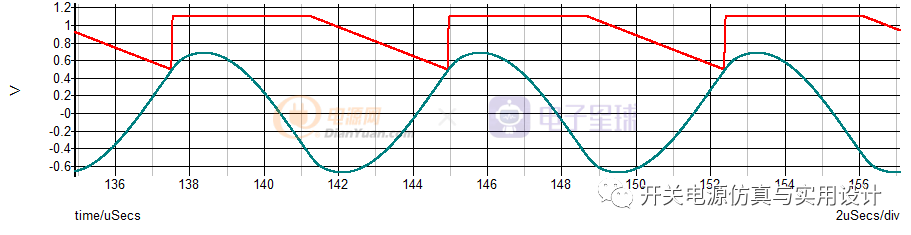
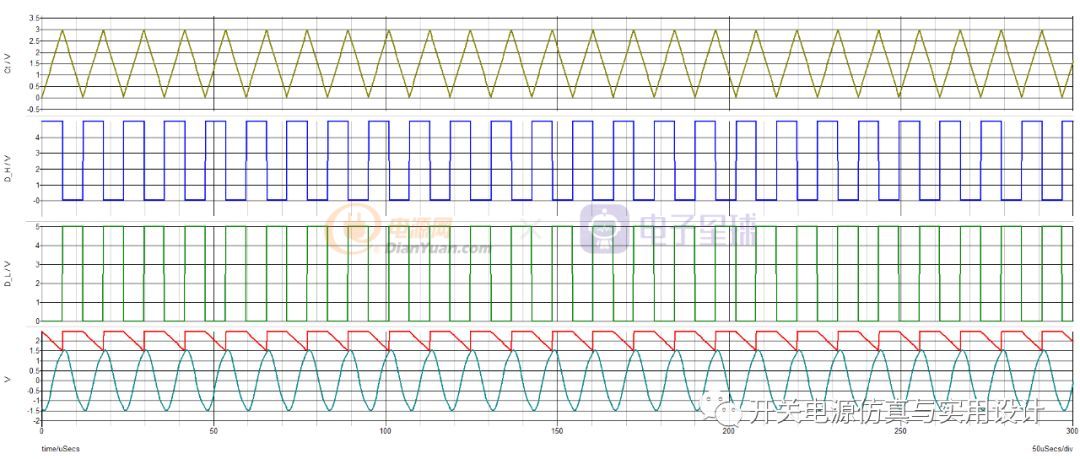
補償LLC工作在不同區域時的電流采樣波形,便于實現控制。諧振電流波形并非如同PWM調制的電流波形一樣是線性上升,并且會在開關關閉后電流會在峰值處直接下降到零。反而諧振電流僅工作在諧振頻率點時,1/4開關周期處是電流正向峰值點。如果在這里關閉高端管那就是完美的峰值電流模式控制,在越過這一峰值電流點后,電流會按正弦波形衰減。但是諧振拓撲很難一直工作在諧振頻率點上,諧振電流的峰值會隨著工作區域的不同而產生變化,在低于諧振頻率時勵磁電流會影響諧振電流,在高于諧振頻率時波形又有不同。所以疊加負向斜坡后,正好能在諧振電流的峰值之前關閉高端管,所以更易于實現控制。至于諧振電流仍會繼續上升,直到電流方向發生改變。下圖是工作在低于諧振頻率時斜率補償和電流采樣的波形,反饋疊加負向斜坡電壓(紅色)與電流采樣信號(藍色)。
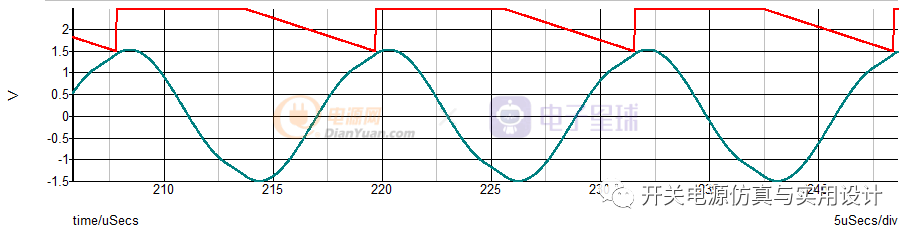
下圖是工作在高于諧振頻率時斜率補償和電流采樣的波形,反饋疊加負向斜坡電壓(紅色)與電流 采樣信號(藍色)。
3. 同于電流型PWM控制器中的斜率補償功能,解決占空比大于50%的問題。
說明:以上三條只是我個人的推測,在沒有得到官方文獻肯定之前,如果有錯誤請海涵,個人能力有限,見諒。
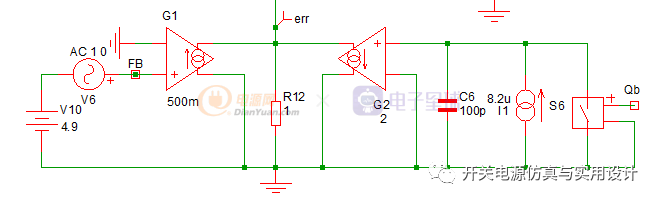
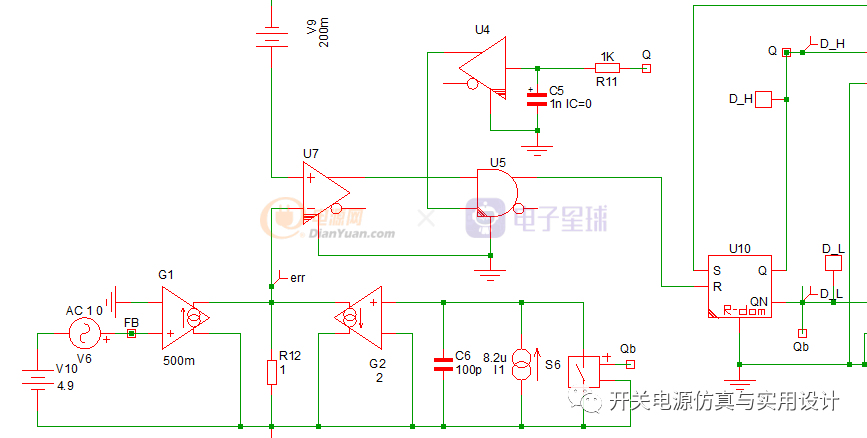
在仿真環境中可使用兩個可控電流源和幾個電阻來搭建,其中G1壓控電流源受反饋電壓控制,設定增益為0.5,也就是在5V輸入時G1會輸出2.5A電流(仿真實現原理而已切勿較真)。另外一個可控電流源G2受斜坡電壓控制,這個斜坡電壓同步高端管開關開通時產生。由一個固定的電流源對電容充電實現,隨著ON時間越長,負向斜坡電壓越低,利用電容的積分器功能。兩個電流源的輸出電流方向相反,從電路原理上實現了減法操作。因此就可以看到直線(反饋由FB電壓控制)在高端開通開關開啟后被減去負向斜坡電壓,這個控制信號送到ON TIME比較器產生關閉高端管的復位信號,作為代表負載功率水平的error信號與電流采樣信號進行比較。下圖是斜率補償的仿真實現:
前沿消影部分
諧振電流會受到副邊二極管反向恢復電流影響產生電流尖峰,在某些情況下也會導致PWM提前關斷。如同傳統PWM控制器中存在的前沿消隱時間功能(LEB)一樣,可以避開在開關剛開通時電流中的尖峰噪音對控制器工作的影響。,下圖是PWM模式中的示意圖

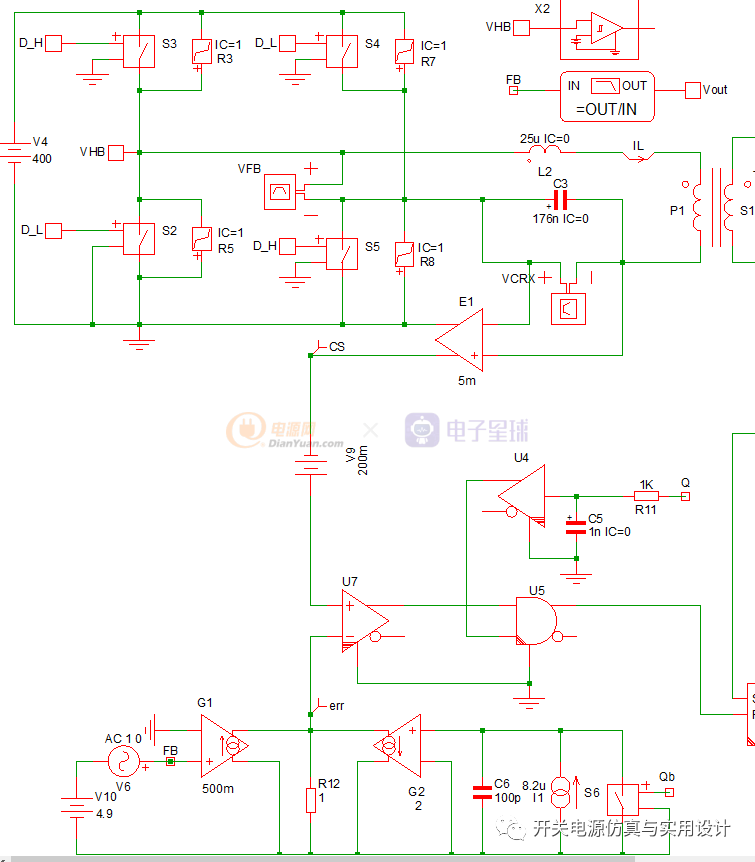
在NCP1399中也存在這個功能,在仿真模型中是通過and門和RC產生的延遲時間來實現。U4是緩沖器,把高端驅動經RC延遲后加到U5上,U5是and門,僅在2個輸入都為H時才能輸出H。因此在R11和C5的RC時間內,U5不會發出H信號給U10用來關閉PWM,因此就實現了LEB功能,可見下圖所示。
電流采樣部分
NCP1399的實際應用是控制半橋LLC,在這種拓撲中諧振電容兩端的電壓是以輸入電壓一半為零點的正弦電壓。再通過兩個串聯電容對諧振電容取樣,實現對諧振電流的采樣。但是為了方便檢查電流模式控制的諧振變換器與電壓模式控制的區別,我使用了在OBC上常用的全橋CLLC功率級進行對比,為什么選在OBC應用來對比?因為在這種應用中輸出端電容極小,電壓模式控制為了避開雙極點的影響,通常會設置非常低的穿越頻率。如果電流模式控制能解決雙極點帶來的增益尖峰,那么就能拓寬系統閉環帶寬,提升OBC的動態響應,降低輸出紋波電流。因為是全橋拓撲不同于NCP1399控制的半橋,所以還需對電流采樣進行一些修改,這里我使用了可控電壓源來實現電容電壓采樣的功能。可見下圖所示,我使用E1對諧振電容電壓衰減200倍,得到零點為0V的正弦波送到ON TIME比較器進行控制,經過仿真測試該種方法可以運行。
到此,電流模式控制的CLLC就可以正常工作了,當然還需反饋控制器,但是加入閉環控制很簡單。不在本文的考察范圍之內,模型可見:
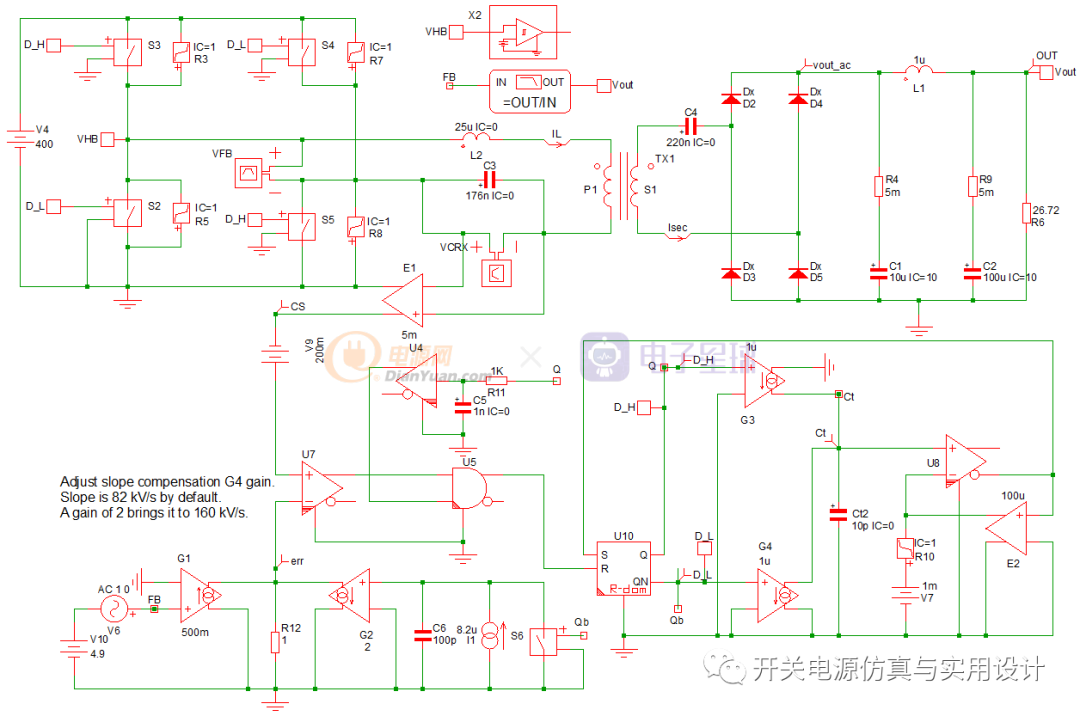
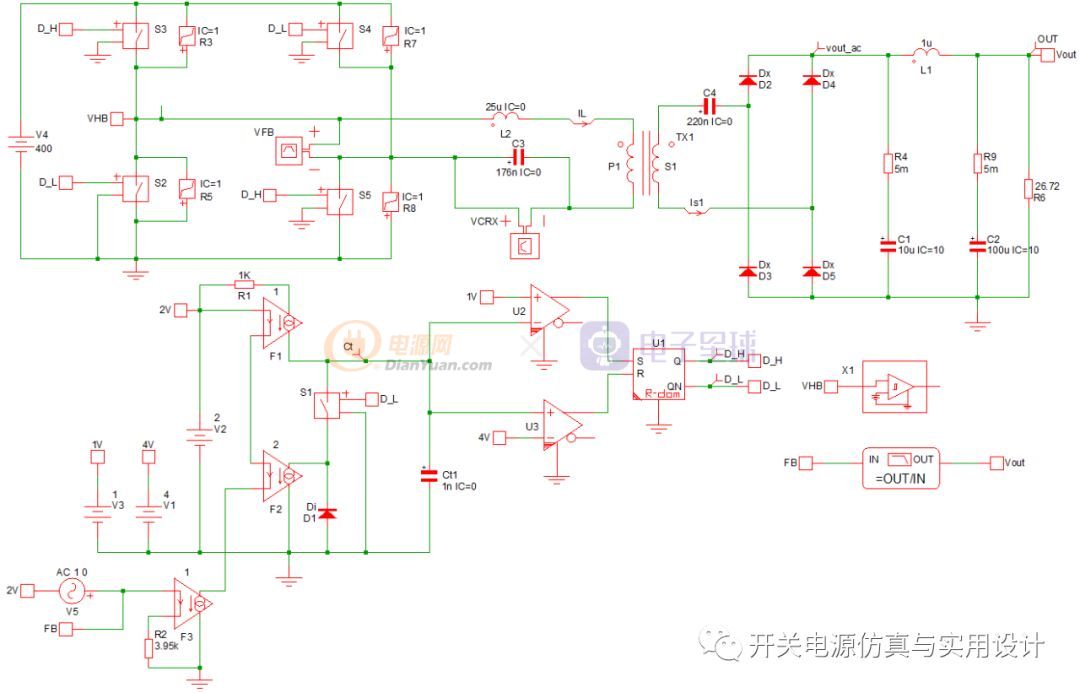
控制電路部分:
功率級部分:
電壓模型控制器的VCO模式:
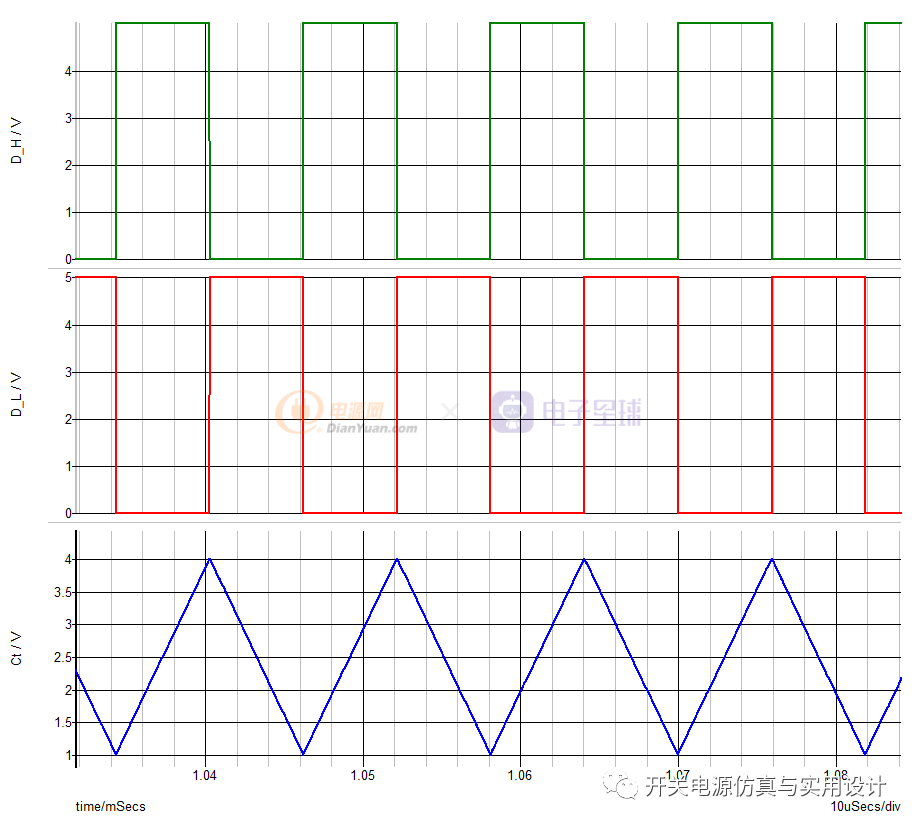
使用兩個可控電流源分別對CT電容充電和放電,電壓兩端的電壓限制在4V和1V之間,通過控制對電容充放電的電流來調整CT上的電壓上升到4V或下降到1V的時間,電流大則VCT電壓上升下降速度快,輸出頻率則高,反之亦然。這個控制原理最早是L6599上實現,后面幾乎成了LLC控制器的工業事實標準,其VCO模型可見:

VCO運行波形:
電壓模式功率級:
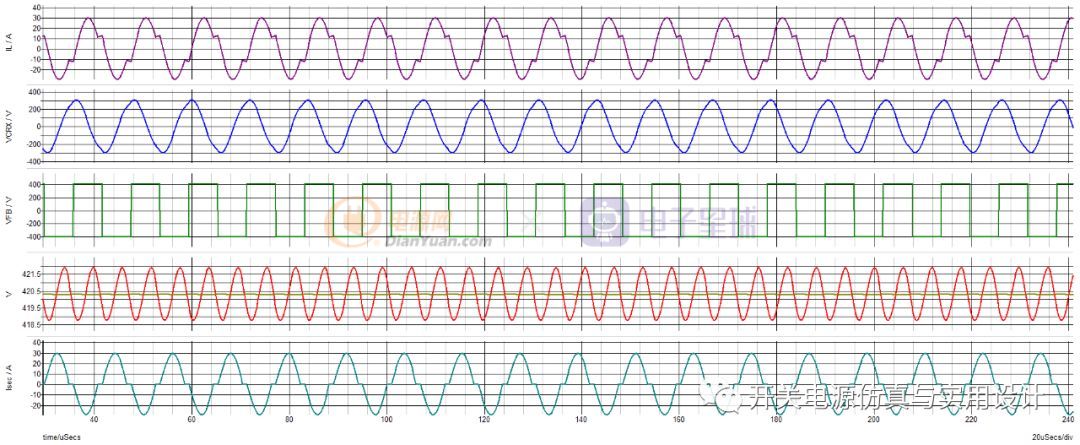
運行結果:

小結:在上文已經展示了電流和電壓控制模式的兩種仿真模型的建模過程,并且都能成功運行。在后面將在時域和頻域進行對比,敬請期待,謝謝。
致謝:Christophe Basso先生,本文基于Christophe Basso先生的NCP1399模型修改而來。
參考文檔:
1,NCP1399 數據手冊。
2,L6599A 數據手冊。
本文未完,后面將繼續更新,敬請期待,謝謝。