

當今頻率調制模式的諧振模式控制器絕大部分都是僅使用輸出電壓或輸出電流進行反饋控制,通過反饋環控制IC內部的頻率調節器VCO或CCO的相應的控制電壓或電流的大小,實現對輸出頻率的控制,這種控制辦法已知至少存在三個缺點:
-
從頻率控制到輸出的小信號模型上存在2階極點,而且當工作在諧振頻率或低于諧振頻率,影響更加明顯。這個雙極點如同VMC的BUCK變換器一樣,在模擬控制中只能通過降低穿越頻率來避開雙極點的影響,因此就顯著的降低閉環帶寬,降低了動態響應調整速度。反饋控制也沒有直接與原邊諧振電流的建立關系,也沒有輸入電壓前饋導致進一步惡化了動態響應。
-
需要高精度和高一致性的振蕩器來保證頻率調制,同時最低和最高頻率需要根據不同的設計進行不同的鉗位,需要增加一個獨立的引腳為其調整用。
-
原邊諧振電流并沒有實際參與控制,還需要一個獨立的引腳來檢查過流和短路等異常工況來保證系統可靠性運行。英飛凌的ICE2HS01G還使用了反饋的狀態配合電流檢測來進行過流保護,雖然能實現更高可靠性,這無疑進一步增加了系統復雜度。
電流模式控制方法的基本原理體現在使用電流信號和反饋控制量進行比較,根據比較結果定義開關管的開通時間。在電流模式控制器NCP1399中,也是使用此種方法來實現電流模式控制原理。當達到設置電流后,高端管關閉,頻率調節器把高端管的開通時間復制給低端管,這樣諧振拓撲的開關頻率就精確的由原邊電流和負載決定。在IC內部具體實現是有一個MCU核,里面有10ns分辨率的高精度數字計數器,把上升沿計數直接復制給下降沿計數即可,這樣就能保證非常高的抗干擾性。
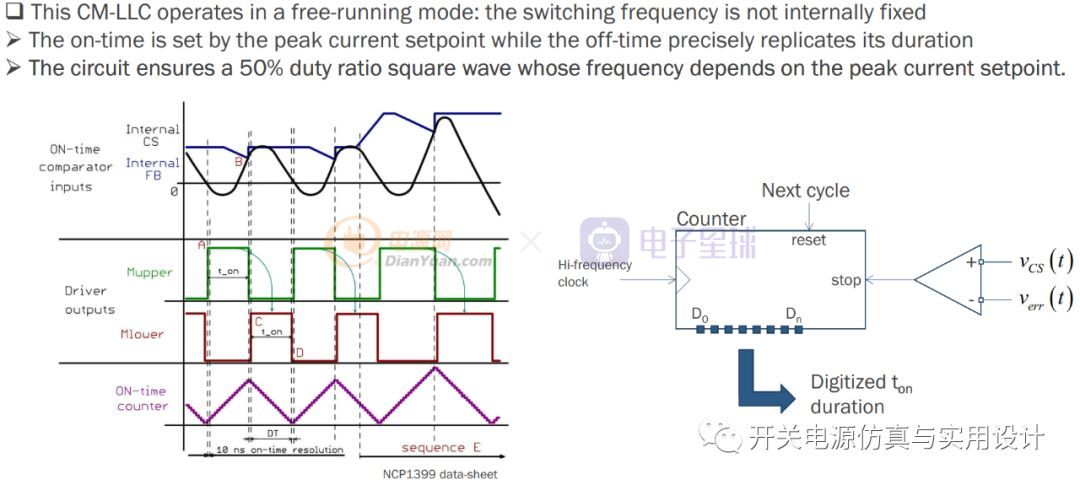
在諧振拓撲中諧振電容上的電壓完全反應了諧振電流的大小,該電壓可以通過在外部使用兩個電容和一些電阻對諧振電容的電壓進行采樣。通過電容電壓串聯后的除法衰減,可以把諧振電容兩端的電壓的表征為諧振電流的被控量送到控制器。這個兩個分壓電容由用戶自己設置,可以隨意的設置變換器的負載功率,所以具有了非常高的靈活度。
高端管開通時間比較器的另外一個信號是反饋環的輸出,在閉環控制系統中,反饋環的輸出電壓高低完全反應了輸出負載的大小。當負載重時反饋輸出電壓高,反饋電壓高則對應著所需的電流信號大,這也對應著更長的高端管導通時間,即為更低的開關頻率。由于反饋引腳的電壓完全決定了系統開關頻率的高低,在IC內部對該引腳的電壓進行了鉗位,在內部會把FB的電壓信號進行一定比例的衰減,這樣主要是為了限制CS引腳的電壓變化范圍,從而降低開關頻率的變化范圍,用來確保系統穩定性。
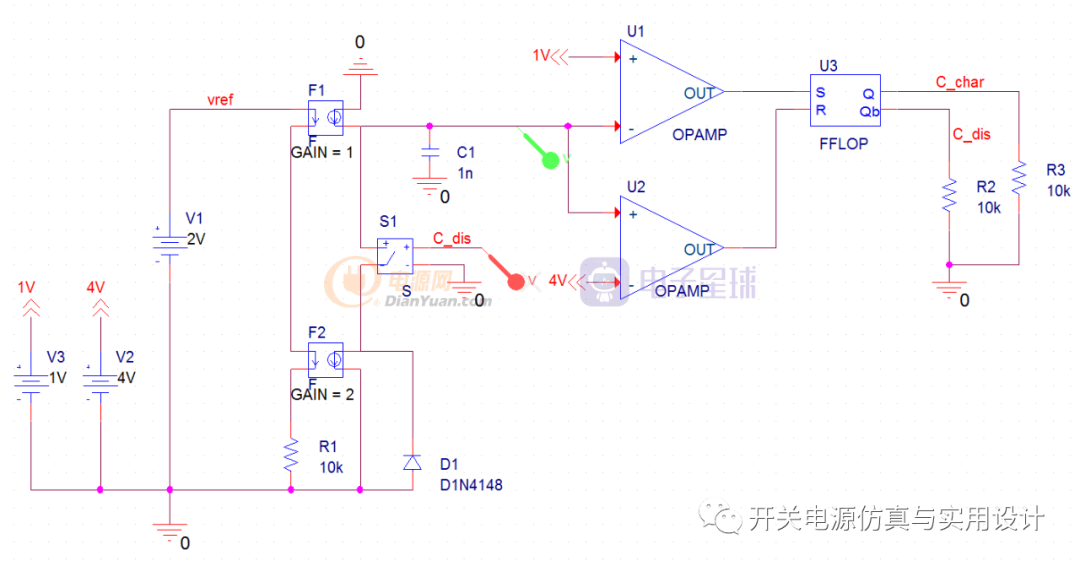
所以NCP1399的控制原理完全可以參見上圖來進行理解,原理性的東西已經講得太多。下面將進行仿真建模,從上文可以看到,電流采樣使用兩個電容分壓,反饋可以使用傳統的運放或TL431,這些都很簡單。麻煩的地方就是要實現把高端驅動復制到低端驅動上,因為IC內部是用數字計數器實現,只需要相應的增減即可。在模擬仿真環境中,該如何實現呢?我曾經為了這個問題困擾了許久,我只能思考到使用一個固定的電流源對一個電容進行充放電就可以確定ON和OFF的時間相等。也許是L6599的CCO模型先入為主的原因,我一直沒有跳出這個框框之中,直到前幾天我看到了basso先生為NCP1399建立的仿真模型,才想通了電流模式的PWM產生方法,可見下圖所示:
工作原理:
-
使用固定壓控電流源G1和G2(同為1uA輸出電流)為定時電容CT充放電。當Q為H,G1為CT充電,此時電壓上升。
-
當比較器那邊的CS的電壓高于FB時發出RESET信號,此時Q1為L,G1停止充電。
-
然后QN由L轉為H,同樣的電流為CT放電,這樣就實現了兩個驅動信號的時間相等。
-
當VCT的電壓低于或等于0V時,這里設置為10mV。比較器U2輸出低于10mV的H到SR觸發器的S,QN停止放電,置位后Q為H,開始新的充電周期。
這個CCO的與L6599的CCO的不同之處為:L6599的VCT的最高4V和最低1V被限制住,調整頻率的方法是調整VCT上三角板的上升和下降時間的速度,通過控制對CT電容的充放電流大小來調整頻率。而NCP1399的頻率調整方法在于不固定VCT的最高電壓,在充放電流統一的設置下,充電的時間越長VCT的電壓越高,隨之從最高電壓下降到0也需要的時間更長。當然這里只是談原理性仿真,在NCP1399中使用數字計數器來實現這個功能,與上文中的仿真模型大有不同。
下圖是L6599的CCO仿真模型。
參考文檔:
1,NCP1399 數據手冊,ON官網。https://www.onsemi.cn/
本文未完,后面將繼續更新,敬請期待,謝謝。