

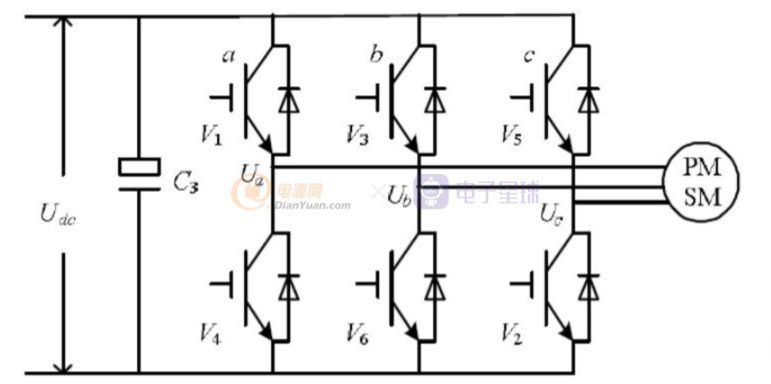
BLDC(無刷直流電機)和PMSM(永磁同步電機)的驅動采用FOC算法來實現成為越來越多人的選擇。硬件上采用三相逆變橋臂來對電機進行驅動,如下圖:
雙電阻采樣:
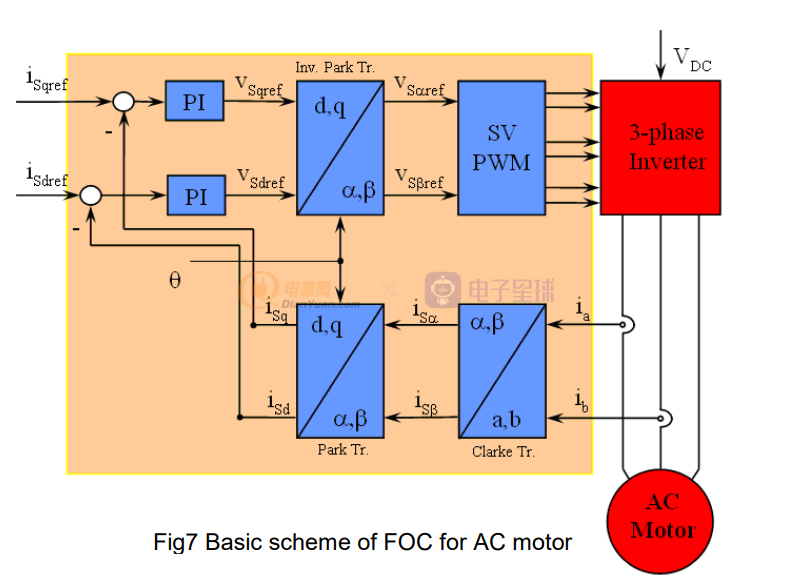
FOC的基本控制算法如下圖。
低側電流感應拓撲使用位于相底部或直流總線返回路徑的電阻器來測量流過相的電流。無論使用何種電阻器配置(單電阻、雙電阻或者三電阻采樣),電流只能在下部開關打開時測量。電流信號必須干凈才能正確采樣電流。干凈的電流信號或電流信號的表示必須沒有振鈴或噪聲。本文主要講到雙電阻和單電阻電流測量技術(三電阻采樣就不再講了,現在基本上沒人用了)。
雙電阻采用需要對電機的a,b相電流進行采樣,
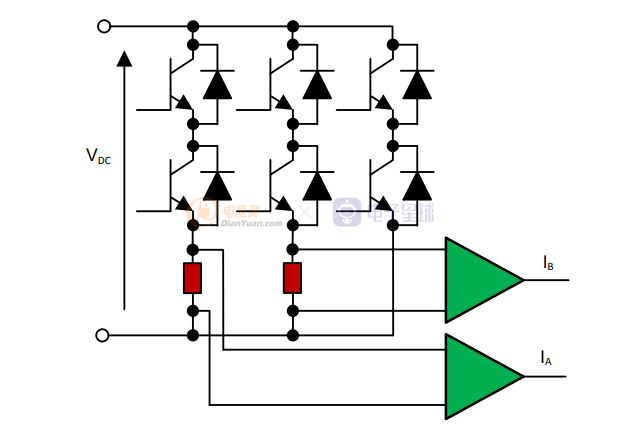
其中c項電流Ic+Ia+Ib=0,計算出c項電流,再根據Clarke變換和park變換得到Id和Iq。從而進行FOC算法控制(具體FOC算法的控制原理,本文不再贅述,這個網上資料很多)。
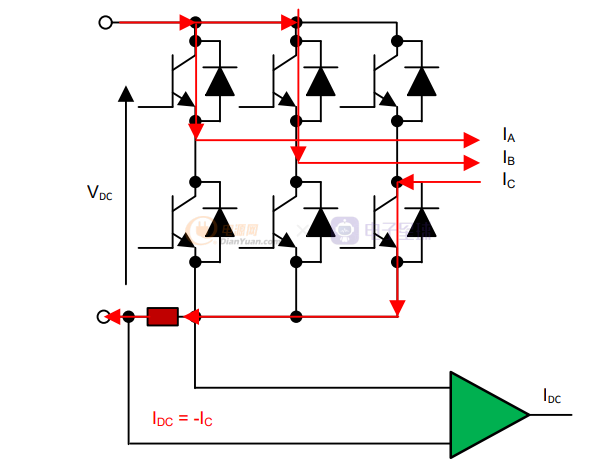
單電阻采樣:
單電阻采用是對單相的電流進行采樣,三相的負端直接短接,短接后再通過采樣電阻進行采樣控制。

在開A相橋臂上管和B、C橋臂下管時即(100)如下圖
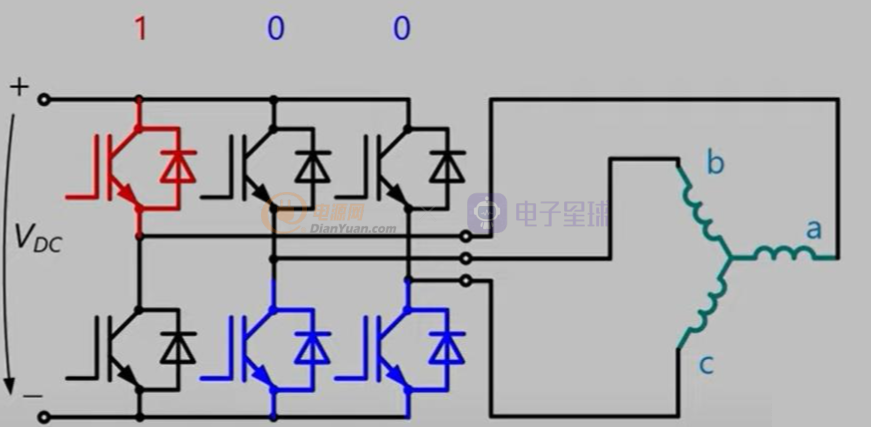
電流流向如下圖,從A相繞組進,B、C繞組出,Idc=+Ia。

在開A、B相橋臂上管和C橋臂下管時即(110)如下圖,Idc=-Ic。
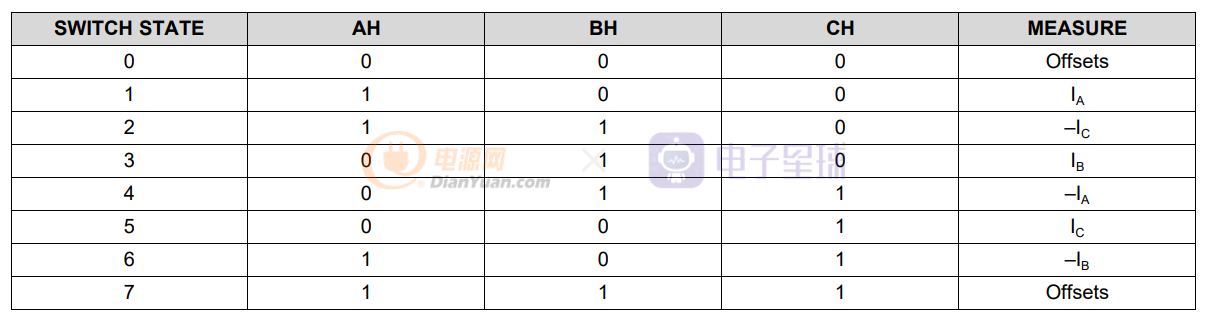
令A橋臂為AH,B橋臂為BH,C橋臂為CH,上管開時為1,下管開時為0。可以得出下表,計算出Idc的實時電流等于多少。從而計算出Ia、Ib、Ic三相電機繞組電流,再進行FOC算法控制。
優缺點對比
相較于單電阻采樣,雙電阻采樣的更成熟,算法控制魯棒性更強。單電阻采樣對控制算法要求更高,魯棒性稍差,但是成本更低。
不管是單電阻采樣還是雙電阻采樣,無傳感器FOC算法里面其實還有一個觀測器(主要跟蹤轉子和定子的角度),采用觀測器算法才能實現無傳感器FOC(以后再和大家分享)。
申明:由于本人水平一般,分享的知識有誤,或者采用的方案不夠好的,歡迎各路大神指正批評,給大家帶來的不便,敬請諒解,本文觀點僅供參考。