

前面我們討論了關于TL431的偏置電流計算以及分壓電阻的計算,本文主要討論關鍵器件--光耦的特性以及在環路中的影響。
光耦合器在通常連接到電源的初級側和出于明顯安全原因與初級隔離的次級側之間提供光鏈路。該鏈接是通過 LED(光子)發出的光建立的,指向將收集光子的雙極晶體管的基極。這會產生集電極電流,其強度取決于 LED 中的注入電流以及它發出的光通量強度。集電極中循環的電流量通過電流傳輸比 (CTR) 與 LED 中流動的電流相關聯。正如之前的陣列所示,該 CTR 取決于 LED 電流、光電耦合器年齡和結溫。這就是光耦合器供應商為您提供轉換器必須穩定的兩個限制的原因。由于光電晶體管中的集電極-基極結必須用作光電探測器,因此制造商將其做得很大,以收集最大數量的光子。不幸的是,這會在收集器和基極之間帶來大電容,從而大大降低了可用帶寬。當然,帶寬取決于集電極上拉電阻和相關的偏置電流。
一、光耦模型
圖1 突出顯示電容器位置的簡化光耦合器模型。
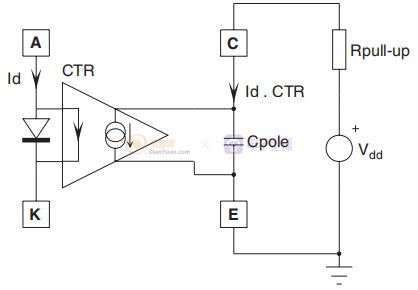
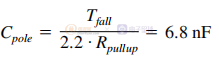
圖 1顯示了光耦合器的簡化表示,其中簡單地將電容器添加到電流控制電流源的輸出。 該電容器是極點存在的證據,并且可以根據在大多數數據表中描述的典型開關電路中測得的光耦合器的下降時間進行評估。 數據表給出了在給定集電極電阻上測得的下降時間。 例如,在 SFH615A-X 上,SHARP 指定使用 1k 上拉電阻獲得的下降時間為 15us。 因此,電容值可以通過簡化公式獲得
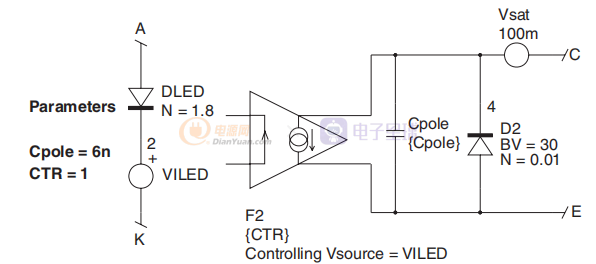
為了改進模型,當 LED 中注入過多電流時,具有零 Vf (N 0.01) 和 30 V 擊穿電壓的二極管將避免負集電極值。 此外,串聯的簡單電壓源代表晶體管飽和電壓。 圖 2 顯示了更新后的模型。
圖2 當 LED 中流過過多電流時,添加二極管有助于避免收斂問題。
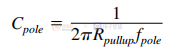
確定 Cpole 的第二個選項是在光耦合器的極點與控制器的偏置方式相同時提取該極點。 一旦知道極點,我們就可以使用控制器上拉電阻值輕松計算等效 Cpole 值:
回顧各種基于 TL431 的電路,我們可以看到,我們添加到光耦合器的集電極或發射極的補償電容器與光耦合器等效電容器 Cpole 并聯。 如果這個等效電容器已經大于計劃并聯的電容器,那么引入的最后一個極點取決于光耦合器,而不再取決于放置的電容器。 為此,當設計寬帶寬電源時,必須采用小的上拉(1 至 4.7 k )電阻,從而提高偏置電流。
二、極點提取
要提取光耦合器極點,您需要知道將其連接到的上拉電阻以及相應的工作偏置電流(例如,NCP1216 為 20 k,以及 5 V 直流電源)。 然后按照圖 3的建議在工作臺上連接光耦合器。 直流電源偏置 LED,將 VFB 節點定位到與標稱轉換器功率相對應的值:在這種情況下約為 3 V,帶來實際偏置電流。 調整 Vbias(或 Rbias)以達到目標。 然后通過將在 VFB 上觀察到的隔直電容器 (Cdc) 注入正弦電壓。 確保 Vrms 的調制幅度足夠低,以 (1) 保持 VFB 不失真和 (2) 保持小信號分析。 觀察 VFB 包絡并增加調制頻率。 一旦包絡以 0.707 (–3 dB) 的比率下降,讀取頻率發生器:這就是極點位置。
圖3 SPICE 簡化了獲得光電耦合器極點位置所需的架構。
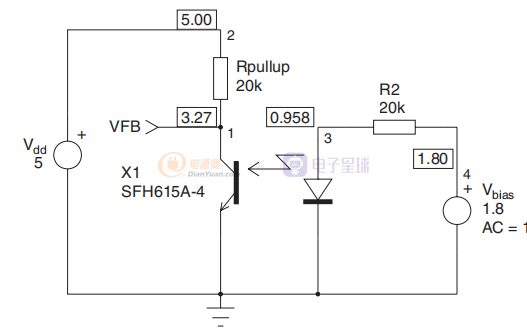
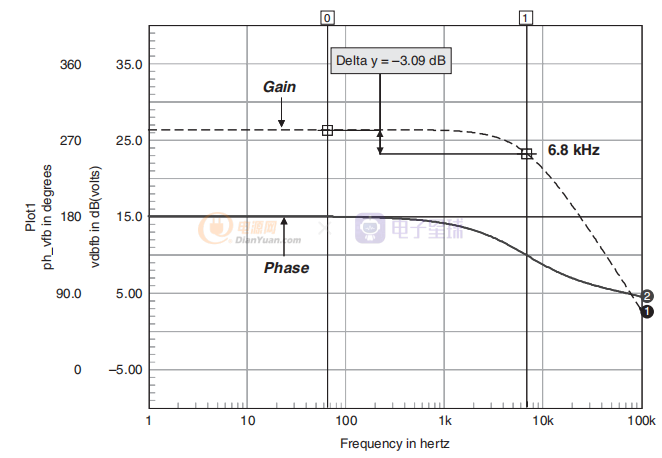
在 SPICE 上,如果從 SPICE 供應商的可用列表中選擇光耦合器型號,則可以如圖3所示進行接線。 在 Vbias 上選擇適當的偏置會導致正確的工作電流 (VFB=3 V)。 然后從 10 Hz 到 100 kHz 進行交流掃描,并繪制 VFB。 當增益下降 -3 dB 時,這就是極點位置(圖 5)。 然后,讀取通過 Rpullup (Ic) 和 RLED (IF) 的電流可以得出所研究光耦合器的 CTR 值。
圖5 光標指示 –3 dB 位置:此電路的 6.8 kHz。
現在很明顯,盡管在設計 2 類或 3 類放大器方面付出了很多努力,但在系統中插入另一個極點可能會破壞過去為獲得正確的帶寬和相位裕度所做的所有努力。 這一點很重要:光耦在這里扮演了叛徒的角色! 在補償供應時,絕對必須考慮其桿位及其自然 CTR 變化。 如果有選擇,請確保光耦合器中有足夠的電流流過,以便將此極點降低到更高的頻率。 例如,我們使用 SFH615A-1 并改變上拉電阻,同時測量極點位置:
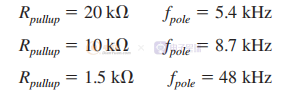
在某些情況下,減小上拉電阻可能會導致更高的待機功耗(來自 Vcc 的更高偏置電流),因此必須找到一些折衷方案。 另一方面,如果你想要大帶寬,你需要有一個低集電極(或發射極)電阻。
三、計算極點
為了簡化補償技術,一個想法包括在第一次交流掃描期間將極點包括在開環增益中。 也就是說,與其最后檢查極點的影響,不如將其放入開環增益傳遞函數中,然后對其應用補償技術。 圖6顯示了一個反激式轉換器,我們將上面的光電耦合器極點與掃描路徑(子電路 X5)串聯。 這是一個簡單的拉普拉斯方程,但等效的 RC 濾波器可以完成相同的工作。
圖6 極點現在與掃描路徑串聯出現。
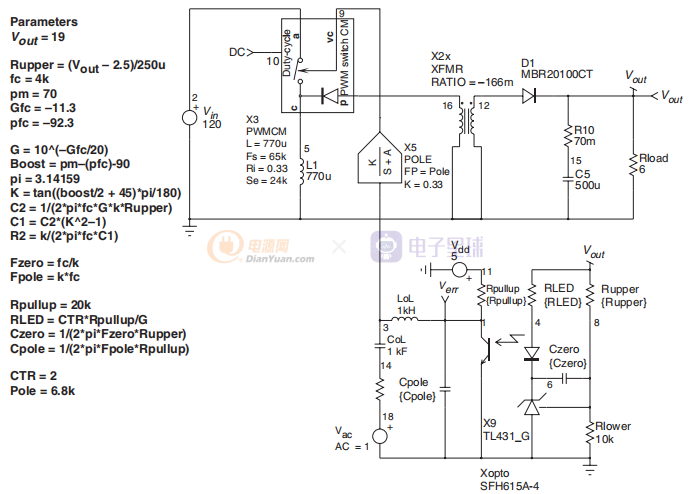
k 因子說明了在流行的電流模式控制器(例如 UC384X 或 NCP1200 系列)中發生的內部除以 3。 此應用描繪了一個經典的筆記本適配器 19 V/3A。掃描后,包含光耦合器極點的波特圖出現在圖7中。
圖7 完整的交流響應,包括光耦合器極點。
從圖 3 中,通過電壓偏置點觀察 RLED 和 Rpullup 中的電流為我們提供了模型在這個特定偏置點的 CTR:CTR=2。當然,從制造商數據表中知道真實的 CTR,您可以使用 這個數字代替補償計算。 給定一階響應,我們將選擇類型 2 放大器并將 k 因子技術應用于圖 7。 當我們在 CCM 中操作轉換器時,反激式轉換器表現出 RHPZ。 該 RHPZ 的最壞情況,即它在低頻部分折回的深度,發生在最小輸入電壓、最大占空比和最高輸出電流時。 根據此 RHPZ 位置,我們將被迫采用位于其最低位置 30% 的交叉點。 降壓-升壓或反激式轉換器的 RHPZ 位置如下:

對于反激式,Lsec 代表次級電感和負載 Rload。 它也可能是初級電感,但 Rload 則需要反映在初級電感上。 讓我們使用次級電感計算,其中 Lp 是初級(磁化)電感:
從方程,我們可以計算各種 RHPZ 位置。 仿真為我們提供了以下任意 50 V 輸入跨度的占空比變化:
在 6 Ω最大負載下,RHPZ 在:


從最小值,我們可以看到它的 30% 給出了 5 kHz 的理論最大可用帶寬。 超過這個值可能會產生振蕩。 我們的目標是 4 kHz,包括一些安全裕度。 使用方程 有助于計算 70 相位裕度和 0 dB 補償為 11.3 dB 的所有補償元件。補償計算在以下頻率處放置一個極點和一個零點:

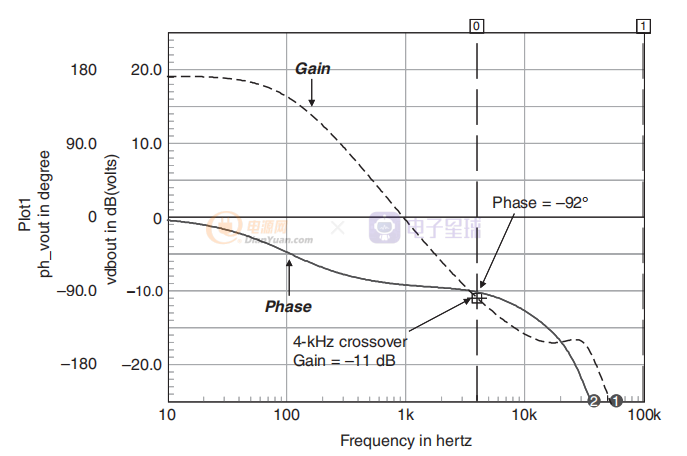
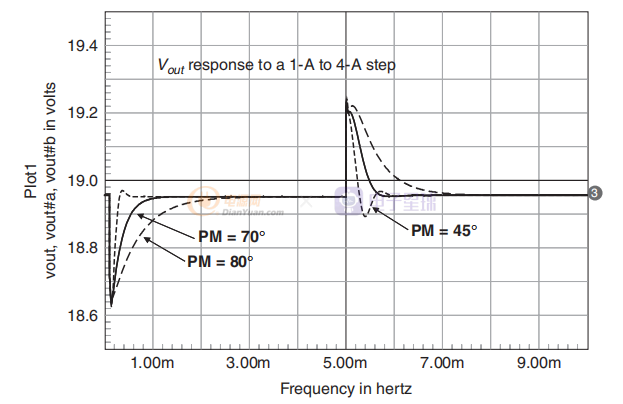
一旦將這些值傳遞給它們對應的組件,就可以在 Verr(光耦合器集電極)上執行最終的交流掃描,以查看補償后獲得的帶寬。在這種情況下,請確保從路徑中移除光耦合器極點。圖8描繪了結果。我們可以觀察到 3.8 kHz 交叉點和 71 相位裕度。增益裕度約為 10 dB,可以通過略微增加斜坡補償水平(在本例中為 50% 的斜率,24 kV/s)或降低帶寬來改善。由于 RLED 具有相當高的值,因此檢查前幾行中突出顯示的所有偏置條件是否有足夠的電流在電路中循環非常重要。最后將執行瞬態步驟以驗證轉換器的穩定性。由于自動補償計算,很容易改變相位裕度并查看瞬態響應如何移動。圖9描繪了應用原理圖,其中 3 V 齊納二極管鉗位最大電流偏移,與 UC384X 或 NCP1200 完全一樣。輸出在 1 us 內從 1 A 步進到 4 A。具有三個不同相位裕度的不同負載響應如圖9 所示。
圖8 最后的交流掃描在人工極點移除之后進行。

圖9階躍負載很好地表明了補償網絡所獲得的穩定性。

圖10改變相位裕度會導致不同的恢復時間。
現在我們解決該技術的實際問題:
1、LED 電阻器在這里起著重要作用,因為它設置了中頻增益。 很少有人真正關注它,但如果你想認真對待環路補償,那么你就不能忽視它的作用。 上面的示例說明 RLED 的值為 11.3 k。 超過 19 V,它讓 LED 電流增加到 (19-1-2.5)/11.3k =1.4 mA。 現在需要檢查該電流乘以光耦合器 CTR 后是否允許完整的反饋電平擺動。 否則,您可能需要選擇更高點擊率的設備,例如 SFH615A–3 或 4(100/200% 或 160/320%)。 在 TL431 中強制超過 1 mA 的外部偏置在這里顯然是強制性的。 一種可能的選擇在于通過從反饋引腳添加另一個電阻到參考電平(如果可用)或添加到 Vcc 引腳來從外部減少上拉電阻。 在上面的例子中,將 Rpullup 減少到 8 k(例如,使用 NCP1200)得到 4.51 k 的 RLED,當然其余組件也被更新。
2、討論由 k 因子或任何其他技術施加的極點位置很重要。 由于放置該極點的電容器與內部等效光耦合器電容器并聯,因此除了噪聲過濾之外,它有時幾乎沒有影響。 例如,上述值建議與 6.8 nF 等效極點并聯接線的 Cpole 值為 310 pF。 帶或不帶 Cpole 的交流掃描環路增益顯示沒有區別,這是正常的。 然而,如果從反饋引腳到光電耦合器的銅線很長,一個 330 pF 的小電容器非常靠近引腳和控制器接地之間的集成電路,不會對抗擾度造成任何損害。
3、如果 Fsw/2 處的雙極點看起來過于尖峰,則次諧波振蕩會影響增益裕度。 可以注入更多斜坡,但有將電流模式轉換為電壓模式的風險,或者更早地降低增益。