

本篇文章將介紹電機驅動電路,并使用Multisim軟件進行仿真。希望與大家一起學習進步!也歡迎讀者朋友關注、收藏、分享和點贊,感謝支持!
01. 選擇控制對象
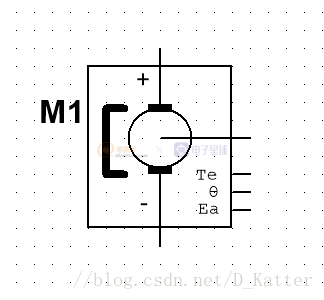
電機在生活中的應用非常廣泛,將電能轉換成各種場合特定的機械能,以滿足日常工業生產及生活。其中常用的直流電機,因為良好的調速性能在電力拖動中得到了很好的應用。結合Multisim仿真軟件,設計電路對象選擇永磁直流電機。

02. 選擇傳感器對像
傳感器用來檢測電機的速度,這里選擇ITR9606 光電傳感器,即對射式的槽型光耦。選擇這種傳感器的原因是價格便宜,原理簡單,雖然不能非常精確的檢測電機的轉速,但是在一定程度上能夠滿足大部分場合的需要,而被人們廣泛應用。
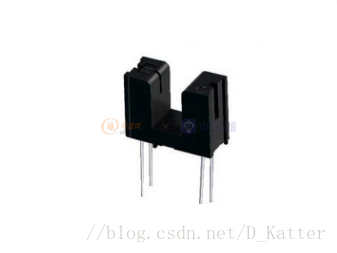

這種槽型的光耦在用來檢測電機速度的時候,還需要在電機的軸上加上一個圓盤,圓盤跟隨著電機軸一起轉動。在圓盤上一般會有凹槽或者圓孔,如果光耦輸出的信號被當住,那么在傳感器的輸出端會輸出低電平,如果輸出的光信號能從孔中穿過而被正常接收,那么輸出就是高電平。

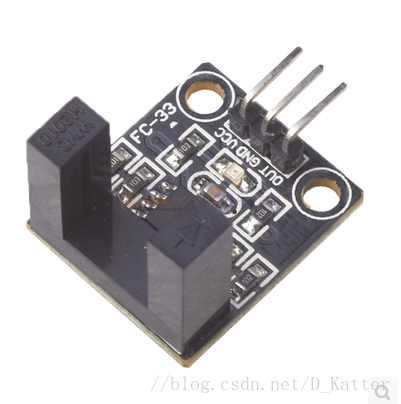
現在市場上應用比較多的一般是將編碼器和電機外殼做在一起了,這樣做,精度和安全性以及使用壽命肯定比都分離開的要好。考慮到原理一樣,都是通過編碼器測量輸出的高低電平來計算出電機的轉速,為了便于后續的仿真,所以這里選擇價格便宜的獨立的器件進行分析和設計。
市場采用的設計如下:


03. 傳感器特性分析
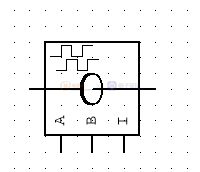
根據官方文檔資料,傳感器的關鍵特性參數如下所示:
工作電壓:3.3~5V
輸出形式 :開關量輸出0/1
遮擋時:1
無遮擋時 0
如果將輸出的開關量輸入到單片機的I/O口,通過多次測量高點平或者低電平的時間,求取平均值,這樣是為了保證測量值是電機的穩定的
04. 驅動電路設計
在設計驅動電路的必須明確的一點就是設計的效果是怎樣的。如果驅動的是簡單的小功率或者單向轉動的電機,那么利用一個大功率三極管或者MOSFET就可以滿足要求。因此,在一開始將驅動電路的設計目標定為可調速,可正反轉。調速需要用到PWM,正反轉需要用到H橋來驅動。H橋的橋臂,小功率的時候選擇三極管就可以實現。大功率則要選擇MOSFET來設計。
4.1 12V/3A直流電機驅動電路設計
如果選定的直流電機12V/2A,電流達到2A,考慮到效率,散熱。功耗等問題,選擇MOEFET進行設計顯然是要優于大功率三極管的。
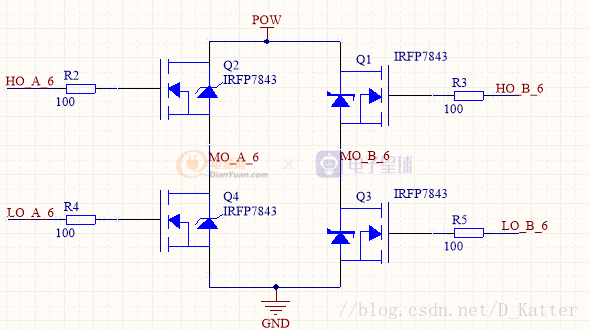
在設計H橋的時候,要考慮的首要問題就是在任何一邊的上下兩個橋臂不能導通,不然會造成電源的短路,電流非常大,直接將MOS管燒毀。因此,驅動MOS管的電路一定保證正傳到反轉具有“死區”時間。這里驅動MOS管的驅動電路選擇可以設置“死區”時間的集成芯片IR2104。

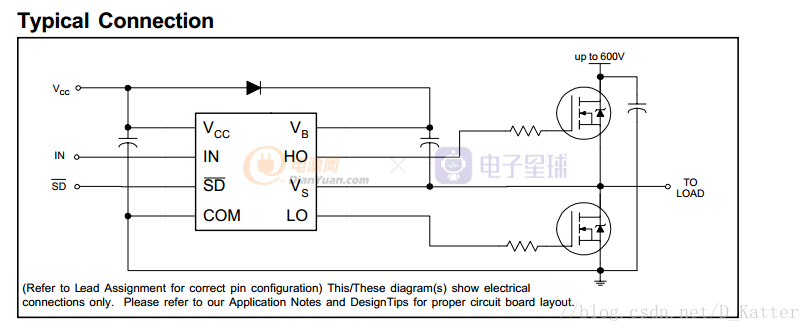
根據IR2104的數據手冊可以看到,這是接的半橋形式,在應用H橋的時候,要使用兩個IR2104。

從數據手冊里面還可以看到,該芯片具有的“死區”時間為520ns,可以保證上下橋臂不會在同時導通。如果根據需要還可以選擇IR2101芯片,在單片機輸出PWM波的時候就可以設置“死區”時間,綜合考慮,IR2104操作起來方便,而且SD片選信號可以很方便的對兩個IR2104進行控制。
選擇集成的IR2104芯片作為驅動MOS管的驅動電路,主要是因為若采用推挽電路或者其他的分離元件進行驅動,高端的MOS管導通后,S級的電壓為電源電壓,這個時候是無法再進行開通,而會直接關斷,選擇集成的芯片能夠很好的解決這個問題。如果上臂選擇PMOS管可以避免這個問題,但是PMOS管在實際生活中應用很少,而且價格昂貴,所以綜合各方面的因素,12V/3A電機驅動電路設計IR2104加上4個NMOS管組成的H橋電路。
4.2 5V/0.35A直流電機驅動電路設計
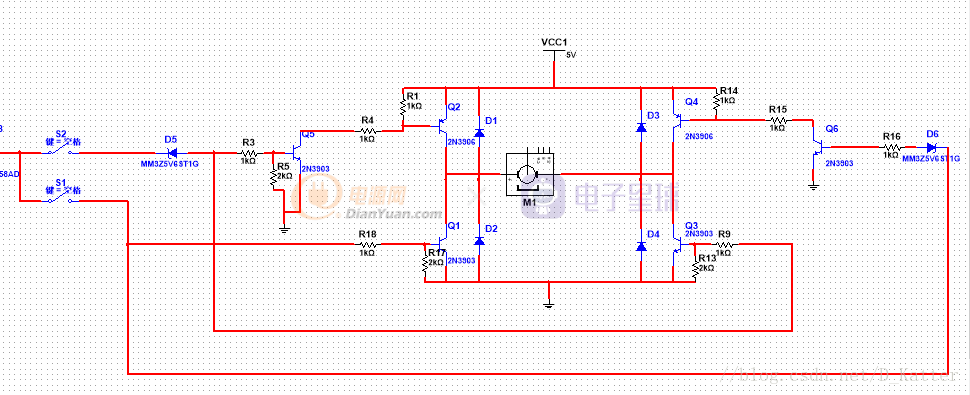
這種小型的直流電機在玩具當中應用特別多。驅動電路設計時,H橋的橋臂可以直接選擇常用的8050和8550三極管即可,價格低廉,而且還容易做到。
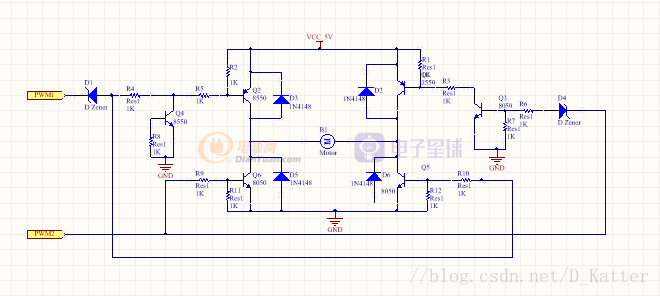
PWM1和PWM2為信號輸入端,當需要控制電機正傳的時候,將PWM1信號使能,PWM2信號關閉;當需要控制電機反轉的時候,先將PWM1關閉,再將PWM2使能,這里利用單片機設置“死區”時間,來保證H橋的正常工作。
05. 整體電路設計
5.1 硬件電路設計
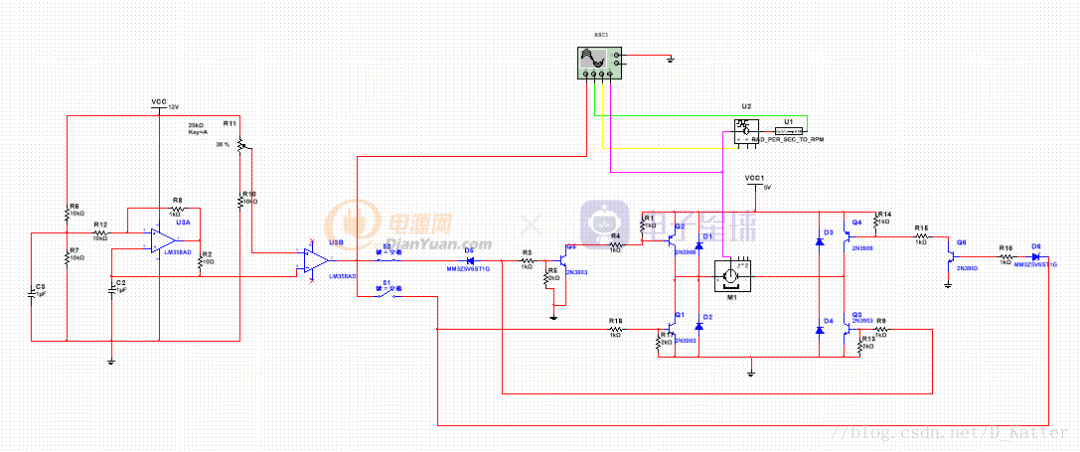
考慮到使用的仿真軟件是Mulsitim,該軟件中沒有集成的芯片H橋驅動芯片,所以最后選擇以5V/0.35A小型直流電機控制電路進行仿真。控制電機轉速的PWM在仿真軟件中,結合在課堂學習的滯回比較器使用運放產生可調節占空比的PWM電路。
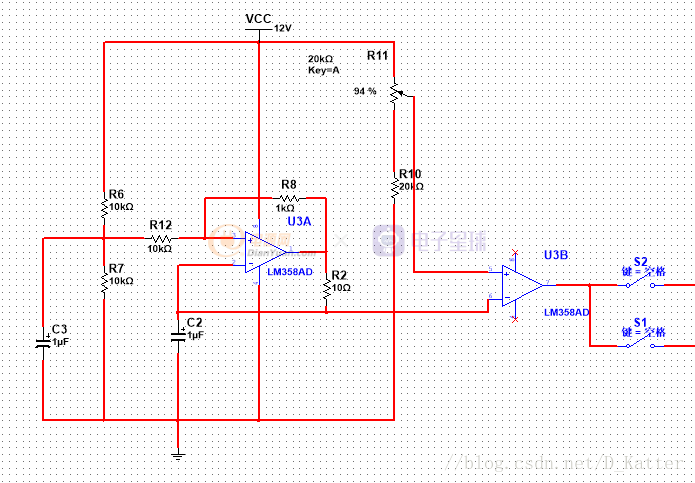
在PWM電路中,通過調節R2、C2、R12、R8來調節PWM的頻率。調節比較器的同相輸入端的電壓,來改變占空比。
5.2 電路仿真

5.3 仿真結果分析
電機啟動時:
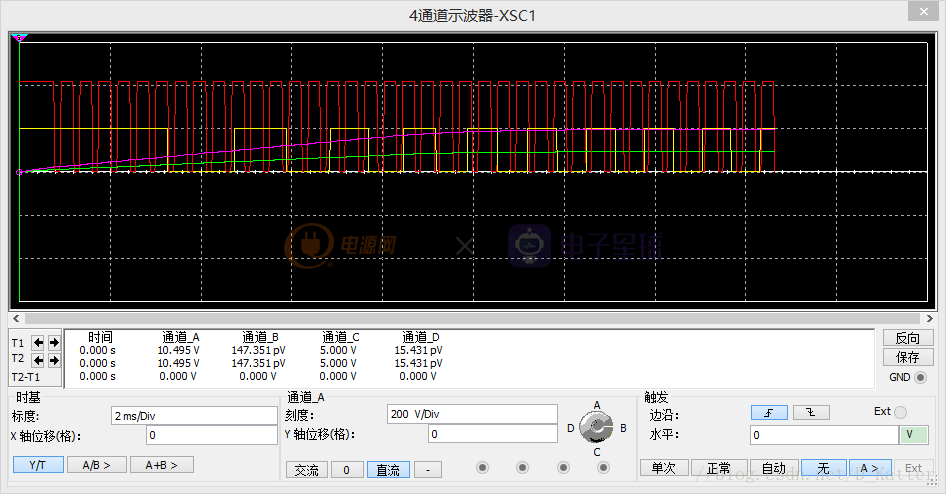
4通道示波器中紅色顯示的為PWM的占空比,此時的占空比為60%。黃色為編碼器的輸出為+5V的脈沖信號,當電機轉動時,編碼器模擬的前面設計的對射式槽型光耦。在啟動的過程中,可以看到編碼器輸出高電平的時間再減少,說明轉速是在增加。綠色線是測量的RPM,在仿真中用到了Rad/S轉RPM轉換器,轉換成電壓讀數是90V。紫色線是直接測量電機軸的輸出,在軟件中轉速是以電壓體現的,在穩定的時候,轉速轉換成電壓讀數為189V。
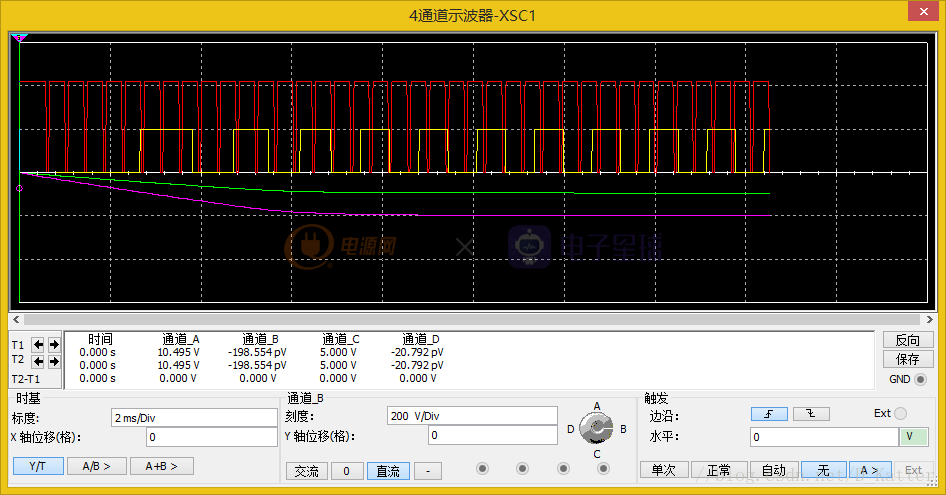
占空比改變時:

紅色顯示的PWM占空比,此時的占空比是80%,與圖16相比,可以看到當占空比增加的時候,電機的轉速增加,紫色線是轉速電壓示數為392V,占空比增加,轉速明顯增加。同時可以看到啟動的時間也有所減小。
電機反轉時:
06.總結
通過設計電機驅動電路,對槽型光耦傳感器,H橋驅動電路,三極管搭建的H橋電路,以及利用三極管進行邏輯取反,利用運放搭建矩形波等等內容進行了相應的學習。加深了對直流電機驅動電路的設計的理解,同時熟練了mulsitim仿真軟件的使用。在完成的過程中,遇到了理論性知識的錯誤,特別是控制分離元件的H橋邏輯,開始竟然理解錯誤了,后來實際的仿真和分析才發現了問題所在。