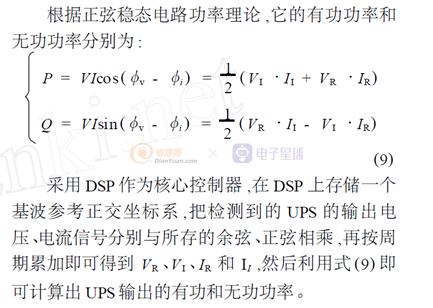
最近看到徐老師《電力電子系統建模及控制》,書中9.1.4章節無互連線并機控制方式,剛好跟要預研的無線并機課題有密切的聯系;
通過大量的資料收集,總結如下:
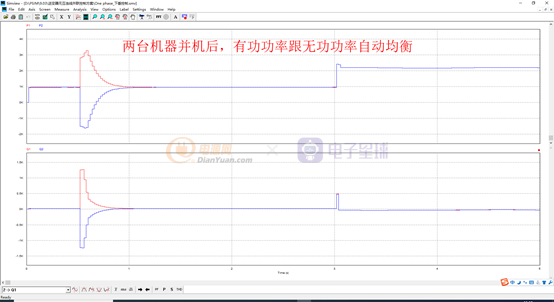
我們可以得出兩臺離網逆變器在并機的時候:
1、 各輸出電壓間的相位差主要造成有功功率的差異,有功環流的方向是從相位超前的單元流向相位滯后的單元,即相位超前的發出正有功環流,相位滯后的發出負有功環流。
2、 各輸出電壓間的幅值差主要造成無功功率的差異,無功環流的方向是從幅值較大的單元流向幅值較小的單元,即幅值大的發出正無功功率,幅值較大的發出正無功環流,幅值較小的發出負無功環流。
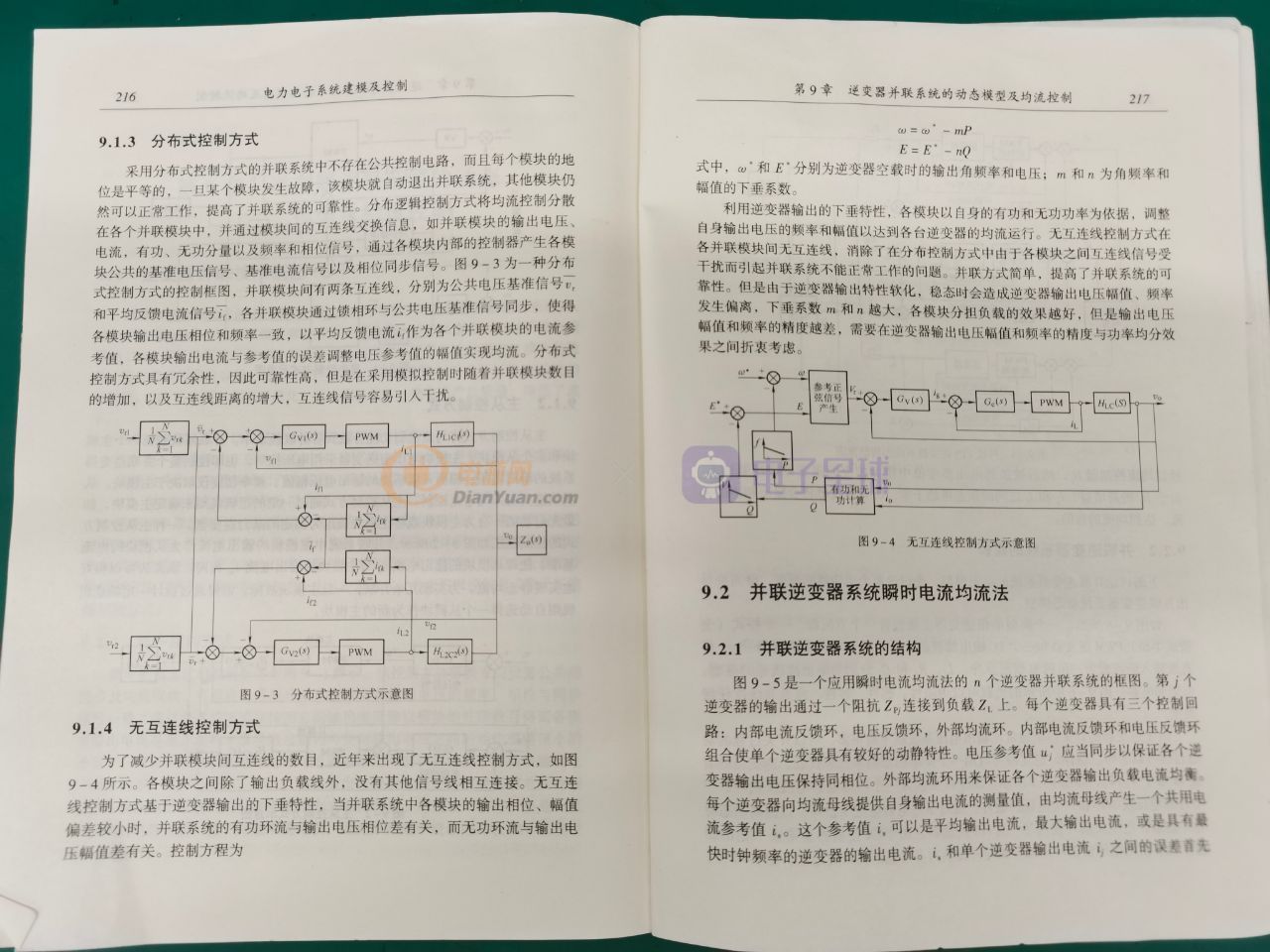
考慮在逆變器的控制中加入下垂特性作為逆變器無互連線的均流控制策略。實際上,逆變器的有功功率環流主要取決于輸出電壓的相位差,而無功功率環流主要取決于輸出電壓的幅值差,若希望負載在并聯的各臺逆變電源之間合理分配,那么在下垂特性中就可以像同步發電機一樣,分別以有功功率和無功功率作為下垂量,響應的以相位(頻率)和電壓幅值作為被垂量,只要下垂的參數選取恰當,那么久可以實現在并聯逆變電源之間負責的合理分配。
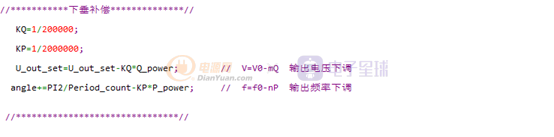
如下為下垂特性方程:
f=f0-mP
V=V0-nQ
式中 f0、V0分別為逆變器空載輸出電壓的頻率和幅值;f、V 分別為逆變器并聯運行時實時計算的輸出電壓頻率和幅值;m、n 分別為有功電壓頻率下垂系數和無功電壓幅值下垂系數。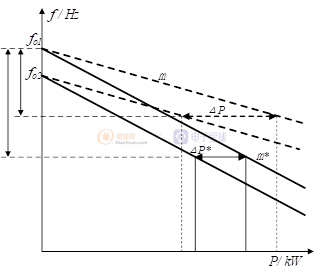
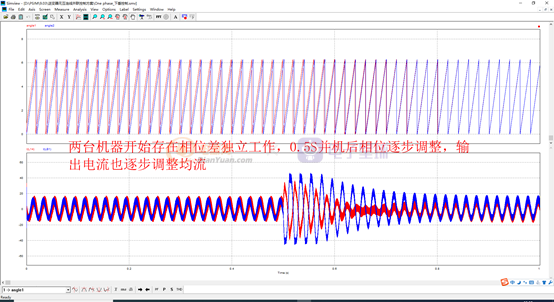
并聯逆變器的通信機制:逆變電源并聯在一起的逆變器穩態時其頻率(或者幅值)的相互一致性,否則系統處于過渡狀態或者趨于崩潰(如果頻率不一致,則兩臺逆變器的相位差一直在變化)。
根據有功電壓頻率下垂方程可知,當輸出電壓相位差逐漸增大時,相位超前的模塊發出有功功率越多,此時其頻率下降也越多;相位滯后的模塊輸出功率小,頻率下降也越少。因此發出功率少的模塊電壓頻率高于發出功率多的模塊電壓頻率,經過一段時間后,兩臺逆變器相位差縮小,最終兩臺逆變器的相位一致,有功功率偏差得到抑制,無功功率偏差的抑制過程類似。其下垂控制框圖如圖 4?2所示:
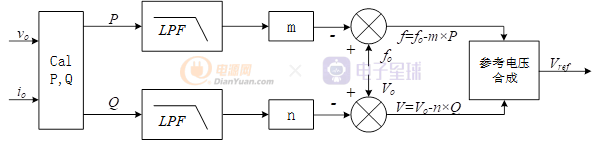
圖 4?2傳統下垂控制框圖

圖 4?3逆變器電壓外環電流內環控制框圖