環路補償參數設計_Buck.xls (excel文件)
環路補償參數設計.rar (Mathcad文件)
buck_type23.rar (Saber文件)
參數沒有做說明,只是試著去看些
用一個極點,一個零點IP1Z 的 TYPE II 去補償 雙極點s^2的控制輸出,補償的增益中必定有s^2的關系
你的上面沒有這種關系
//---------------------------------------------------------------------------------------------------------------------
說說我對環路補償的理解吧
環路了補償跟所有的放大器補償是一樣,目的只有一個是放大器穩定
工程計算的方法通常是以BODE圖去做研究的
通過傳遞函數是去找出函數變化發生轉折的點(叫拐點可能跟函數的里面的拐點不一樣的意義,
函數的拐點是凹凸性發生改變的點),這個轉折點就是零點和極點
而不是通過去解傳遞函數的方程的方法
這樣所有的計算就相當于做加減乘除法了,環路其實很簡單的
一個極點相當于一個RC積分器
相位偏移 θ = - arctan( ω / ωp ) , ωp為極點頻率
增益是G = -20 lg ( ω / ωp)
同樣零點相當于一個RC微分器
尋著這個思路,上面的所有計算都是很容易的
在以-1斜率的低頻率段,通過提高低頻段的增益,就相當于提高了相位的邊界 PM
這個增益補償完了,再反過來可以驗證下就可以了,就像磁芯飽和的計算一樣的。
計算不是環路的補償的難點,難點是因為在補償環路有很多分布參數的影響,造成相移
這個很難控制,所以才有上面提高相位的邊界PM值。
其實環路補償是很簡單,真的是很簡單,特別是TYPE III型補償更簡單,
增加了電路零件,而補償變得更容易了。
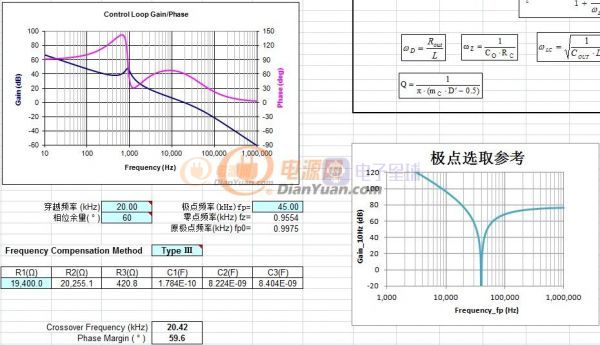
按這種方法設置后的總開環bode圖如下:
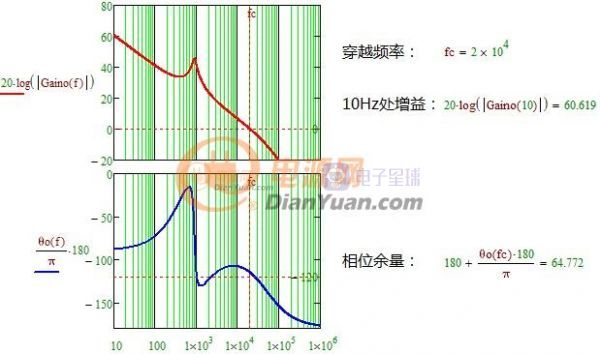
將穿越頻率設置成預期的20kHz,10Hz處增益60.619dB,相位余量64.772度,低頻增益和相位余量都沒有達到預期值。(如果將相位余量設置為60度,穿越頻率就不是20kHz了)
如果期望在20kHz穿越頻率處的相位余量是50度,采用這種方法得到的結果依然是64.772度,這種方法跟K-factor法相似雖然設置相對簡單但結果只能是固定的一種(無法得到最優參數)。
低頻增益和相位余量都沒有達到預期值
這個低頻的增益,可以調整第一、二個零點的增益
也就是EA反饋電阻R2/R1的比值
通過補償后,BODE圖應該是閉環的增益BODE,相位BODE圖
Gc(s) = Go(s) / [ 1 + Go(s) * F(s) ]
Go(s) 開環增益,Gc(s) 閉環增益, F(s) 環路補償
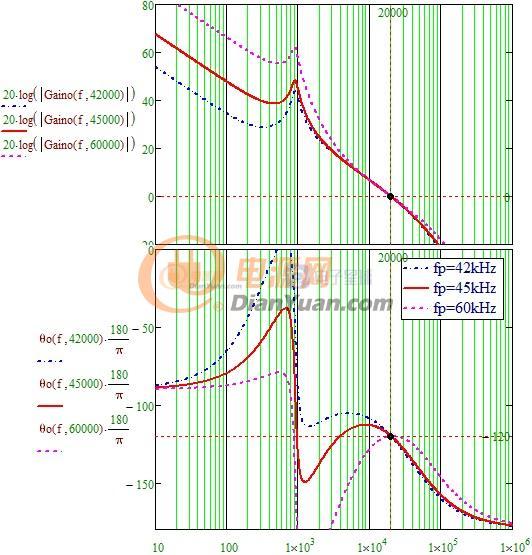
調零點增益(我的理解是調原極點)可以改變低頻增益同時穿越頻率也會跟著改變,如果期望二者都達到預期值還需重新設置零點、極點的位置。
環路補償中的參數一般都是改一個而關聯影響好幾個所以在設置上會有些麻煩,如果采用試湊法在bode圖上移動零、極點也能得出差不多的結果不過需要一點經驗和了解一些規律。
一樓附件中的方法就是普通解方程的方法,將所有的變量關聯起來(消元)最終只剩下少量幾個未知量,上述設計方法中是以極點頻率fp為待設變量的。
另這個補償后的圖是開環bode圖既Go(s)。