
反激電源設計及應用之六:控制環路設計.
作為應用工程師,每天接觸的是電源的設計工程師,發現不管是電源的老手,高手,新手,幾乎對控制環路的設計一籌莫展,基本上靠實驗.靠實驗當然是可以的,但出問題時往往無從下手,在這里我想以反激電源為例子(在所有拓撲中環路是最難的,由于RHZ的存在),大概說一下怎么計算,至少使大家在有問題時能從理論上分析出解決問題的思路.
全部回復(375)
正序查看
倒序查看
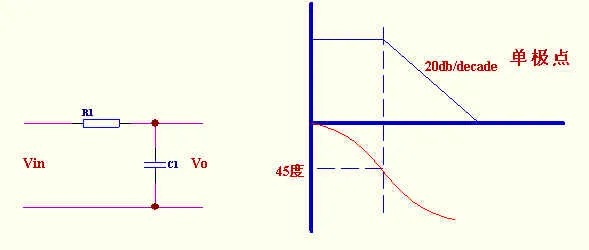
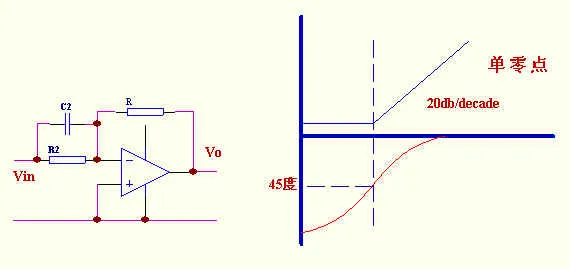
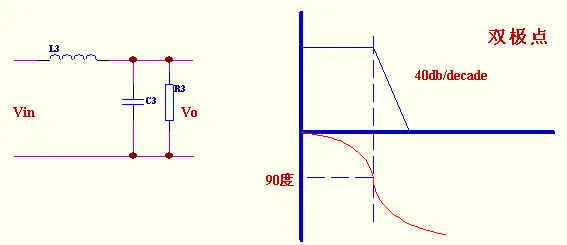
一些基本知識,零,極點的概念
示意圖:
 500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/17/1084340048.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/17/1084340048.jpg');}" onmousewheel="return imgzoom(this);">
 500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/17/1084340058.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/17/1084340058.jpg');}" onmousewheel="return imgzoom(this);">
 500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/17/1084340069.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/17/1084340069.jpg');}" onmousewheel="return imgzoom(this);">
 500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/17/1084340078.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/17/1084340078.jpg');}" onmousewheel="return imgzoom(this);">
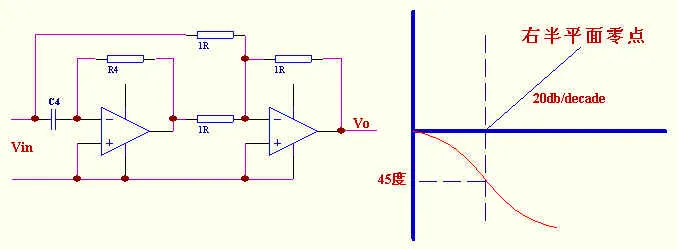
這里給出了右半平面零點的原理表示,這對用PSPICE做仿真很有用,可以直接套用此圖.
示意圖:
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/17/1084340048.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/17/1084340058.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/17/1084340069.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/17/1084340078.jpg');}" onmousewheel="return imgzoom(this);">
這里給出了右半平面零點的原理表示,這對用PSPICE做仿真很有用,可以直接套用此圖.
1
回復
@cmg
一些基本知識,零,極點的概念示意圖:[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/17/1084340048.jpg');}"onmousewheel="returnimgzoom(this);">[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/17/1084340058.jpg');}"onmousewheel="returnimgzoom(this);">[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/17/1084340069.jpg');}"onmousewheel="returnimgzoom(this);">[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/17/1084340078.jpg');}"onmousewheel="returnimgzoom(this);">這里給出了右半平面零點的原理表示,這對用PSPICE做仿真很有用,可以直接套用此圖.
兄弟很久不見了,近來到那里玩去了?
0
回復
@cmg
一些基本知識,零,極點的概念示意圖:[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/17/1084340048.jpg');}"onmousewheel="returnimgzoom(this);">[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/17/1084340058.jpg');}"onmousewheel="returnimgzoom(this);">[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/17/1084340069.jpg');}"onmousewheel="returnimgzoom(this);">[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/17/1084340078.jpg');}"onmousewheel="returnimgzoom(this);">這里給出了右半平面零點的原理表示,這對用PSPICE做仿真很有用,可以直接套用此圖.
不錯.學校的教授們也應該來看看,免得讓我們出來混的時候又得再看一遍書.
0
回復
 500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/17/1084354321.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/17/1084354321.jpg');}" onmousewheel="return imgzoom(this);">
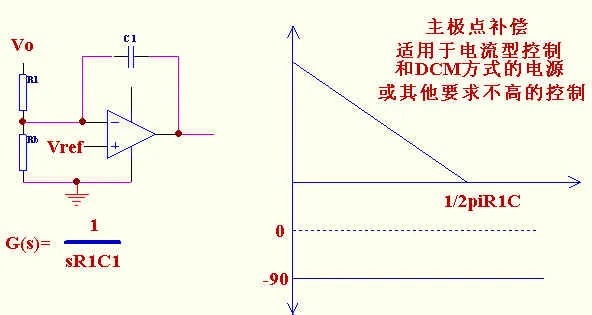
單極點補償,適用于電流型控制和工作在DCM方式并且濾波電容的ESR零點頻率較低的電源.其主要作用原理是把控制帶寬拉低,在功率部分或加有其他補償的部分的相位達到180度以前使其增益降到0dB. 也叫主極點補償.
 500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/17/1084354339.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/17/1084354339.jpg');}" onmousewheel="return imgzoom(this);">
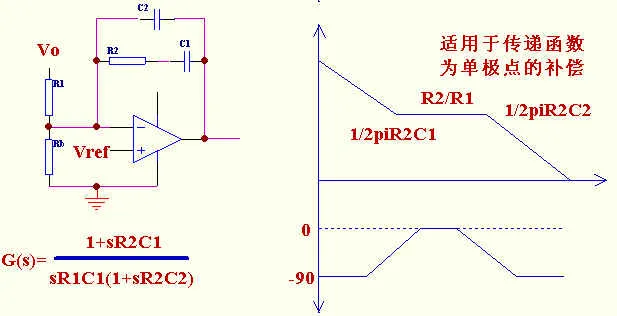
雙極點,單零點補償,適用于功率部分只有一個極點的補償.如:所有電流型控制和
非連續方式電壓型控制.
 500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/17/1084354384.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/17/1084354384.jpg');}" onmousewheel="return imgzoom(this);">
三極點,雙零點補償.適用于輸出帶LC諧振的拓撲,如所有沒有用電流型控制的電感電流連續方式拓撲.
注:2,3中公式里面根據實際情況有些簡化.一般C2<
0
回復
@cmg
[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/17/1084354321.jpg');}"onmousewheel="returnimgzoom(this);">單極點補償,適用于電流型控制和工作在DCM方式并且濾波電容的ESR零點頻率較低的電源.其主要作用原理是把控制帶寬拉低,在功率部分或加有其他補償的部分的相位達到180度以前使其增益降到0dB.也叫主極點補償.[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/17/1084354339.jpg');}"onmousewheel="returnimgzoom(this);">雙極點,單零點補償,適用于功率部分只有一個極點的補償.如:所有電流型控制和非連續方式電壓型控制.[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/17/1084354384.jpg');}"onmousewheel="returnimgzoom(this);">三極點,雙零點補償.適用于輸出帶LC諧振的拓撲,如所有沒有用電流型控制的電感電流連續方式拓撲.注:2,3中公式里面根據實際情況有些簡化.一般C2
老兄,快點呀,我對這方面總是搞不懂!
0
回復
@cmg
一些基本知識,零,極點的概念示意圖:[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/17/1084340048.jpg');}"onmousewheel="returnimgzoom(this);">[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/17/1084340058.jpg');}"onmousewheel="returnimgzoom(this);">[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/17/1084340069.jpg');}"onmousewheel="returnimgzoom(this);">[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/17/1084340078.jpg');}"onmousewheel="returnimgzoom(this);">這里給出了右半平面零點的原理表示,這對用PSPICE做仿真很有用,可以直接套用此圖.
這兩天正好碰到反饋環不穩定,導致開關占空比有很大波動....
0
回復
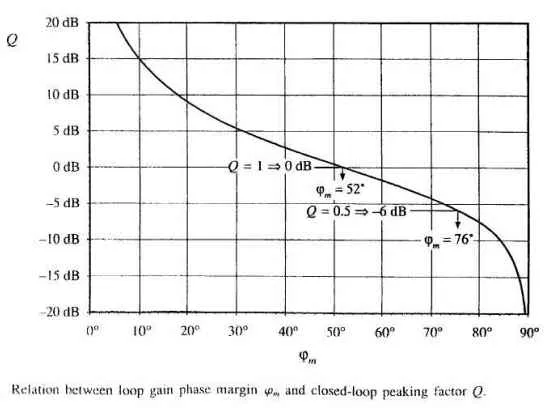
環路穩定的標準.
只要在增益為1時(0dB)整個環路的相移小于360度,環路就是穩定的.
但如果相移接近360度,會產生兩個問題:1)相移可能因為溫度,負載及分布參數的
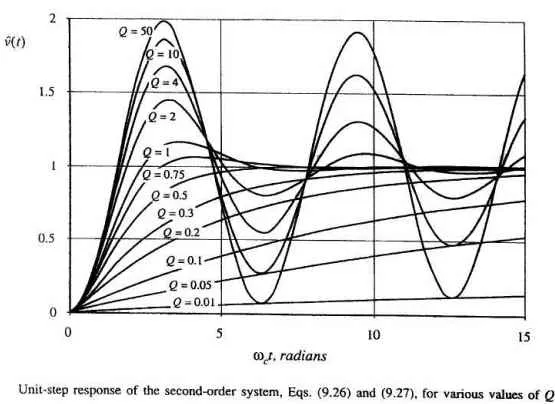
變化而達到360度而產生震蕩;2)接近360度,電源的階躍響應(瞬時加減載)表現為強烈震蕩,使輸出達到穩定的時間加長,超調量增加.如下圖所示具體關系.
 500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/17/1084413832.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/17/1084413832.jpg');}" onmousewheel="return imgzoom(this);">
 500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/17/1084413842.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/17/1084413842.jpg');}" onmousewheel="return imgzoom(this);">
所以環路要留一定的相位裕量,如圖Q=1時輸出是表現最好的,所以相位裕量的最佳值為52度左右,工程上一般取45度以上.如下圖所示:
 500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/17/1084413900.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/17/1084413900.jpg');}" onmousewheel="return imgzoom(this);">
這里要注意一點,就是補償放大器工作在負反饋狀態,本身就有180度相移,所以留給功率部分和補償網絡的只有180度.幅值裕度不管用上面哪種補償方式都是自動滿足的,所以設計時一般不用特別考慮.由于增益曲線為-20dB/decade時,此曲線引起的最大相移為90度,尚有90度裕量,所以一般最后合成的整個增益曲線應該為-20dB/decade部分穿過0dB.在低于0dB帶寬后,曲線最好為-40dB/decade,這樣增益會迅速上升,低頻部分增益很高,使電源輸出的直流部分誤差非常小,既電源有很好的負載和線路調整率.
只要在增益為1時(0dB)整個環路的相移小于360度,環路就是穩定的.
但如果相移接近360度,會產生兩個問題:1)相移可能因為溫度,負載及分布參數的
變化而達到360度而產生震蕩;2)接近360度,電源的階躍響應(瞬時加減載)表現為強烈震蕩,使輸出達到穩定的時間加長,超調量增加.如下圖所示具體關系.
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/17/1084413832.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/17/1084413842.jpg');}" onmousewheel="return imgzoom(this);">
所以環路要留一定的相位裕量,如圖Q=1時輸出是表現最好的,所以相位裕量的最佳值為52度左右,工程上一般取45度以上.如下圖所示:
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/17/1084413900.jpg');}" onmousewheel="return imgzoom(this);">
這里要注意一點,就是補償放大器工作在負反饋狀態,本身就有180度相移,所以留給功率部分和補償網絡的只有180度.幅值裕度不管用上面哪種補償方式都是自動滿足的,所以設計時一般不用特別考慮.由于增益曲線為-20dB/decade時,此曲線引起的最大相移為90度,尚有90度裕量,所以一般最后合成的整個增益曲線應該為-20dB/decade部分穿過0dB.在低于0dB帶寬后,曲線最好為-40dB/decade,這樣增益會迅速上升,低頻部分增益很高,使電源輸出的直流部分誤差非常小,既電源有很好的負載和線路調整率.
0
回復
@cmg
環路穩定的標準.只要在增益為1時(0dB)整個環路的相移小于360度,環路就是穩定的.但如果相移接近360度,會產生兩個問題:1)相移可能因為溫度,負載及分布參數的變化而達到360度而產生震蕩;2)接近360度,電源的階躍響應(瞬時加減載)表現為強烈震蕩,使輸出達到穩定的時間加長,超調量增加.如下圖所示具體關系.[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/17/1084413832.jpg');}"onmousewheel="returnimgzoom(this);">[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/17/1084413842.jpg');}"onmousewheel="returnimgzoom(this);">所以環路要留一定的相位裕量,如圖Q=1時輸出是表現最好的,所以相位裕量的最佳值為52度左右,工程上一般取45度以上.如下圖所示:[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/17/1084413900.jpg');}"onmousewheel="returnimgzoom(this);">這里要注意一點,就是補償放大器工作在負反饋狀態,本身就有180度相移,所以留給功率部分和補償網絡的只有180度.幅值裕度不管用上面哪種補償方式都是自動滿足的,所以設計時一般不用特別考慮.由于增益曲線為-20dB/decade時,此曲線引起的最大相移為90度,尚有90度裕量,所以一般最后合成的整個增益曲線應該為-20dB/decade部分穿過0dB.在低于0dB帶寬后,曲線最好為-40dB/decade,這樣增益會迅速上升,低頻部分增益很高,使電源輸出的直流部分誤差非常小,既電源有很好的負載和線路調整率.
ok
0
回復
@cmg
環路穩定的標準.只要在增益為1時(0dB)整個環路的相移小于360度,環路就是穩定的.但如果相移接近360度,會產生兩個問題:1)相移可能因為溫度,負載及分布參數的變化而達到360度而產生震蕩;2)接近360度,電源的階躍響應(瞬時加減載)表現為強烈震蕩,使輸出達到穩定的時間加長,超調量增加.如下圖所示具體關系.[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/17/1084413832.jpg');}"onmousewheel="returnimgzoom(this);">[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/17/1084413842.jpg');}"onmousewheel="returnimgzoom(this);">所以環路要留一定的相位裕量,如圖Q=1時輸出是表現最好的,所以相位裕量的最佳值為52度左右,工程上一般取45度以上.如下圖所示:[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/17/1084413900.jpg');}"onmousewheel="returnimgzoom(this);">這里要注意一點,就是補償放大器工作在負反饋狀態,本身就有180度相移,所以留給功率部分和補償網絡的只有180度.幅值裕度不管用上面哪種補償方式都是自動滿足的,所以設計時一般不用特別考慮.由于增益曲線為-20dB/decade時,此曲線引起的最大相移為90度,尚有90度裕量,所以一般最后合成的整個增益曲線應該為-20dB/decade部分穿過0dB.在低于0dB帶寬后,曲線最好為-40dB/decade,這樣增益會迅速上升,低頻部分增益很高,使電源輸出的直流部分誤差非常小,既電源有很好的負載和線路調整率.
0DB線上的相移小于180度.
你的圖是正確的,描述是錯誤的,怎么會是360度呢?
你的圖是正確的,描述是錯誤的,怎么會是360度呢?
0
回復
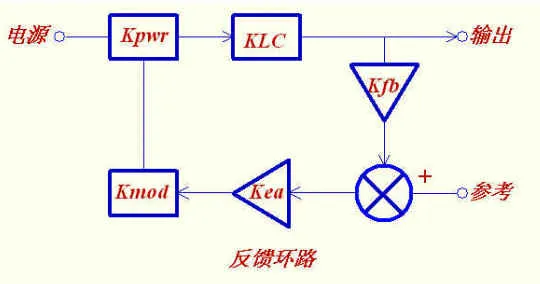
四, 如何設計控制環路?
經常主電路是根據應用要求設計的,設計時一般不會提前考慮控制環路的設計.我們的前提就是假設主功率部分已經全部設計完成,然后來探討環路設計.環路設計一般由下面幾過程組成:
1) 畫出已知部分的頻響曲線.
2) 根據實際要求和各限制條件確定帶寬頻率,既增益曲線的0dB頻率.
3) 根據步驟2)確定的帶寬頻率決定補償放大器的類型和各頻率點.使帶寬處的曲線斜率為20dB/decade,畫出整個電路的頻響曲線.
上述過程也可利用相關軟件來設計:如pspice, POWER-4-5-6.
一些解釋:
 500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/17/1084445831.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/17/1084445831.jpg');}" onmousewheel="return imgzoom(this);">
已知部分的頻響曲線是指除Kea(補償放大器)外的所有部分的乘積,在波得圖上是相加.
環路帶寬當然希望越高越好,但受到幾方面的限制:a)香農采樣定理決定了不可能大于1/2 Fs; b)右半平面零點(RHZ)的影響,RHZ隨輸入電壓,負載,電感量大小而變化,幾乎無法補償,我們只有把帶寬設計的遠離它,一般取其1/4-1/5;c)補償放大器的帶寬不是無窮大,當把環路帶寬設的很高時會受到補償放大器無法提供增益的限制,及電容零點受溫度影響等.所以一般實際帶寬取開關頻率的1/6-1/10
經常主電路是根據應用要求設計的,設計時一般不會提前考慮控制環路的設計.我們的前提就是假設主功率部分已經全部設計完成,然后來探討環路設計.環路設計一般由下面幾過程組成:
1) 畫出已知部分的頻響曲線.
2) 根據實際要求和各限制條件確定帶寬頻率,既增益曲線的0dB頻率.
3) 根據步驟2)確定的帶寬頻率決定補償放大器的類型和各頻率點.使帶寬處的曲線斜率為20dB/decade,畫出整個電路的頻響曲線.
上述過程也可利用相關軟件來設計:如pspice, POWER-4-5-6.
一些解釋:
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/17/1084445831.jpg');}" onmousewheel="return imgzoom(this);">
已知部分的頻響曲線是指除Kea(補償放大器)外的所有部分的乘積,在波得圖上是相加.
環路帶寬當然希望越高越好,但受到幾方面的限制:a)香農采樣定理決定了不可能大于1/2 Fs; b)右半平面零點(RHZ)的影響,RHZ隨輸入電壓,負載,電感量大小而變化,幾乎無法補償,我們只有把帶寬設計的遠離它,一般取其1/4-1/5;c)補償放大器的帶寬不是無窮大,當把環路帶寬設的很高時會受到補償放大器無法提供增益的限制,及電容零點受溫度影響等.所以一般實際帶寬取開關頻率的1/6-1/10
0
回復
@cmg
一些基本知識,零,極點的概念示意圖:[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/17/1084340048.jpg');}"onmousewheel="returnimgzoom(this);">[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/17/1084340058.jpg');}"onmousewheel="returnimgzoom(this);">[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/17/1084340069.jpg');}"onmousewheel="returnimgzoom(this);">[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/17/1084340078.jpg');}"onmousewheel="returnimgzoom(this);">這里給出了右半平面零點的原理表示,這對用PSPICE做仿真很有用,可以直接套用此圖.
我頂!
0
回復
@cmg
四,如何設計控制環路?經常主電路是根據應用要求設計的,設計時一般不會提前考慮控制環路的設計.我們的前提就是假設主功率部分已經全部設計完成,然后來探討環路設計.環路設計一般由下面幾過程組成:1)畫出已知部分的頻響曲線.2)根據實際要求和各限制條件確定帶寬頻率,既增益曲線的0dB頻率.3)根據步驟2)確定的帶寬頻率決定補償放大器的類型和各頻率點.使帶寬處的曲線斜率為20dB/decade,畫出整個電路的頻響曲線.上述過程也可利用相關軟件來設計:如pspice,POWER-4-5-6.一些解釋:[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/17/1084445831.jpg');}"onmousewheel="returnimgzoom(this);">已知部分的頻響曲線是指除Kea(補償放大器)外的所有部分的乘積,在波得圖上是相加. 環路帶寬當然希望越高越好,但受到幾方面的限制:a)香農采樣定理決定了不可能大于1/2Fs;b)右半平面零點(RHZ)的影響,RHZ隨輸入電壓,負載,電感量大小而變化,幾乎無法補償,我們只有把帶寬設計的遠離它,一般取其1/4-1/5;c)補償放大器的帶寬不是無窮大,當把環路帶寬設的很高時會受到補償放大器無法提供增益的限制,及電容零點受溫度影響等.所以一般實際帶寬取開關頻率的1/6-1/10
說的固然不錯,但我覺得要按上述方法設計反饋補償時,首先要能夠知道系統開環時的正確的傳遞函數和波特圖的起始曲線,這樣才使上面說的方法有了基礎或依據.而初始狀態(開環狀態)傳遞函數要怎樣推倒請大家說說吧.
0
回復
@cmg
四,如何設計控制環路?經常主電路是根據應用要求設計的,設計時一般不會提前考慮控制環路的設計.我們的前提就是假設主功率部分已經全部設計完成,然后來探討環路設計.環路設計一般由下面幾過程組成:1)畫出已知部分的頻響曲線.2)根據實際要求和各限制條件確定帶寬頻率,既增益曲線的0dB頻率.3)根據步驟2)確定的帶寬頻率決定補償放大器的類型和各頻率點.使帶寬處的曲線斜率為20dB/decade,畫出整個電路的頻響曲線.上述過程也可利用相關軟件來設計:如pspice,POWER-4-5-6.一些解釋:[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/17/1084445831.jpg');}"onmousewheel="returnimgzoom(this);">已知部分的頻響曲線是指除Kea(補償放大器)外的所有部分的乘積,在波得圖上是相加. 環路帶寬當然希望越高越好,但受到幾方面的限制:a)香農采樣定理決定了不可能大于1/2Fs;b)右半平面零點(RHZ)的影響,RHZ隨輸入電壓,負載,電感量大小而變化,幾乎無法補償,我們只有把帶寬設計的遠離它,一般取其1/4-1/5;c)補償放大器的帶寬不是無窮大,當把環路帶寬設的很高時會受到補償放大器無法提供增益的限制,及電容零點受溫度影響等.所以一般實際帶寬取開關頻率的1/6-1/10
cmg講的很形象,自動控制的知識運用的也這么好,真是佩服,敬仰!我想知道tl431加光耦的反饋回路的傳遞函數怎么計算,零極點如何體現的,謝謝.
0
回復
@cmg
環路穩定的標準.只要在增益為1時(0dB)整個環路的相移小于360度,環路就是穩定的.但如果相移接近360度,會產生兩個問題:1)相移可能因為溫度,負載及分布參數的變化而達到360度而產生震蕩;2)接近360度,電源的階躍響應(瞬時加減載)表現為強烈震蕩,使輸出達到穩定的時間加長,超調量增加.如下圖所示具體關系.[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/17/1084413832.jpg');}"onmousewheel="returnimgzoom(this);">[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/17/1084413842.jpg');}"onmousewheel="returnimgzoom(this);">所以環路要留一定的相位裕量,如圖Q=1時輸出是表現最好的,所以相位裕量的最佳值為52度左右,工程上一般取45度以上.如下圖所示:[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/17/1084413900.jpg');}"onmousewheel="returnimgzoom(this);">這里要注意一點,就是補償放大器工作在負反饋狀態,本身就有180度相移,所以留給功率部分和補償網絡的只有180度.幅值裕度不管用上面哪種補償方式都是自動滿足的,所以設計時一般不用特別考慮.由于增益曲線為-20dB/decade時,此曲線引起的最大相移為90度,尚有90度裕量,所以一般最后合成的整個增益曲線應該為-20dB/decade部分穿過0dB.在低于0dB帶寬后,曲線最好為-40dB/decade,這樣增益會迅速上升,低頻部分增益很高,使電源輸出的直流部分誤差非常小,既電源有很好的負載和線路調整率.
“在低于0dB帶寬后,曲線最好為-40dB/decade,這樣增益會迅速上升,低頻部分增益很高,使電源輸出的直流部分誤差非常小,既電源有很好的負載和線路調整率.”
這段話怎么樣解釋呢,聽起來很有道理,但我在“Switching power supplu design"一書中它講的是:增加低頻部分的增益,是為了抑制市電的100HZ的紋波脈動,當時我也不清楚怎么解釋,不知請能幫忙解釋一下.謝謝了!
這段話怎么樣解釋呢,聽起來很有道理,但我在“Switching power supplu design"一書中它講的是:增加低頻部分的增益,是為了抑制市電的100HZ的紋波脈動,當時我也不清楚怎么解釋,不知請能幫忙解釋一下.謝謝了!
0
回復
@cmg
四,如何設計控制環路?經常主電路是根據應用要求設計的,設計時一般不會提前考慮控制環路的設計.我們的前提就是假設主功率部分已經全部設計完成,然后來探討環路設計.環路設計一般由下面幾過程組成:1)畫出已知部分的頻響曲線.2)根據實際要求和各限制條件確定帶寬頻率,既增益曲線的0dB頻率.3)根據步驟2)確定的帶寬頻率決定補償放大器的類型和各頻率點.使帶寬處的曲線斜率為20dB/decade,畫出整個電路的頻響曲線.上述過程也可利用相關軟件來設計:如pspice,POWER-4-5-6.一些解釋:[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/17/1084445831.jpg');}"onmousewheel="returnimgzoom(this);">已知部分的頻響曲線是指除Kea(補償放大器)外的所有部分的乘積,在波得圖上是相加. 環路帶寬當然希望越高越好,但受到幾方面的限制:a)香農采樣定理決定了不可能大于1/2Fs;b)右半平面零點(RHZ)的影響,RHZ隨輸入電壓,負載,電感量大小而變化,幾乎無法補償,我們只有把帶寬設計的遠離它,一般取其1/4-1/5;c)補償放大器的帶寬不是無窮大,當把環路帶寬設的很高時會受到補償放大器無法提供增益的限制,及電容零點受溫度影響等.所以一般實際帶寬取開關頻率的1/6-1/10
“環路帶寬當然希望越高越好”,這話似有不妥之處,環路的帶寬不能一味求大,當然了,帶寬大,對輸入端信號的控制能力強,而在另一方面,對輸入端的高頻干擾的抑制力就會減弱,因此環路帶寬的選擇是個折中的考慮,還請cmg老師指教.
0
回復
@tiger武
“在低于0dB帶寬后,曲線最好為-40dB/decade,這樣增益會迅速上升,低頻部分增益很高,使電源輸出的直流部分誤差非常小,既電源有很好的負載和線路調整率.”這段話怎么樣解釋呢,聽起來很有道理,但我在“Switchingpowersuppludesign"一書中它講的是:增加低頻部分的增益,是為了抑制市電的100HZ的紋波脈動,當時我也不清楚怎么解釋,不知請能幫忙解釋一下.謝謝了!
談談我的理解:整個環路的直流增益在低頻時越高越好,這樣一是可以抑制輸入電壓的低頻噪聲,如您所說的市電100Hz;二是可以使得輸出電壓相對于參考電壓的直流誤差減小.零極點的主要作用就是為了增加低頻時的增益.
0
回復
