DIY小車這個項目已經很多了,對于前后左右等控制,司空見慣,這次嘗試一下能監控的多功能控制小車,電腦,手機都可以!
多功能車基本功能參數和關鍵部件,視頻傳輸這塊和我們現在智能家具這塊無線視頻原理一樣,下面會有介紹
1.輸入電源:2串或3串的鋰電池(帶充電器)
2.輸出5v,3.3V等電壓為負載供電
3.四個直流減速電機
4.WIFI數傳模塊
5.電機驅動模塊
6.STM32F105主控板
7.UVC攝像頭
8.小車底盤
最后實現電腦或手機通過wifi和軟件控制小車動作并實時監控
框圖

DIY小車這個項目已經很多了,對于前后左右等控制,司空見慣,這次嘗試一下能監控的多功能控制小車,電腦,手機都可以!
多功能車基本功能參數和關鍵部件,視頻傳輸這塊和我們現在智能家具這塊無線視頻原理一樣,下面會有介紹
1.輸入電源:2串或3串的鋰電池(帶充電器)
2.輸出5v,3.3V等電壓為負載供電
3.四個直流減速電機
4.WIFI數傳模塊
5.電機驅動模塊
6.STM32F105主控板
7.UVC攝像頭
8.小車底盤
最后實現電腦或手機通過wifi和軟件控制小車動作并實時監控
框圖
舵機的基本控制原理
控制信號由接收機的通道進入信號調制芯片,獲得直流偏置電壓。它內部有一個基準電路,產生周期為20ms,寬度為1.5ms的基準信號,將獲得的直流偏置電壓與電位器的電壓比較,獲得電壓差輸出。最后,電壓差的正負輸出到電機驅動芯片決定電機的正反轉。當電機轉速一定時,通過級聯減速齒輪帶動電位器旋轉,使得電壓差為0,電機停止轉動。
舵機的控制一般需要一個20ms左右的時基脈沖,該脈沖的高電平部分一般為0.5ms-2.5ms范圍內的角度控制脈沖部分,總間隔為2ms。以180度角度伺服為例,那么對應的控制關系是這樣的:
0.5ms--------------0度;
1.0ms------------45度;
1.5ms------------90度;
2.0ms-----------135度;
2.5ms-----------180度;
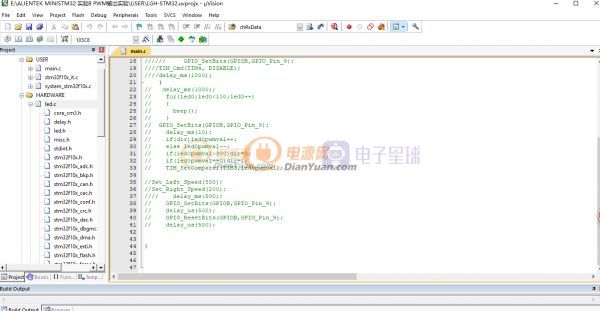
看看程序中是怎么控制的
用STM32硬件PWM和模擬PWM都可以
TIM_OCInitTypeDef TIM_OCInitStructure; TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //?????aPWM?£ê?1 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; TIM_OCInitStructure.TIM_Pulse = Speed_Left-1; //éè??í¨μà2μ?μ???ì?±??μ£?ê?3?áííaò???????±èμ?PWM TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //μ±?¨ê±?÷??êy?μD?óúCCR1_Valê±?a??μ??? TIM_OC1Init(TIM5, &TIM_OCInitStructure); //ê1?üí¨μà1 TIM_OC1PreloadConfig(TIM5, TIM_OCPreload_Enable);我們改變這個值
Speed_Left-1就可以改變舵機角度
這個是整個產品的核心wifi模塊
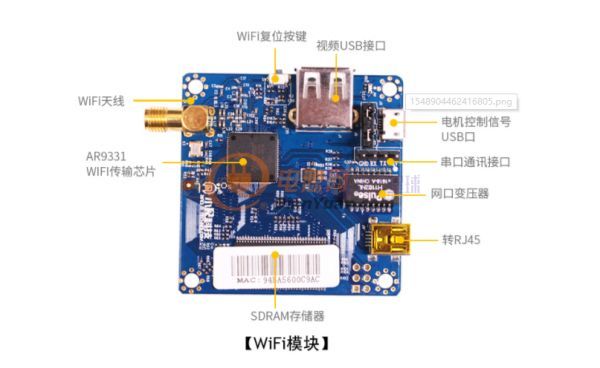
wifi數傳模塊是基于MIPS 24K 高通CPU的一款WIFI1X1芯片AR9331,其SDK采用uboot作為引導。是基于MIPS 架構的,目前有x86、ARM和MIPS三種主流芯片架構,ARM集架構的主要特點:一是體積小、低功耗、低成本、高性能;二是大量使用寄存器且大多數數據操作都在寄存器中完成,命令執行速度更快;三是尋址方式靈活簡單,執行效率高;四是命令長度固定,可通過多流水線方式提高處理效率。
wifi模塊的工作原理
WiFi模塊通過采集掛載在USB接口的MJPG格式的攝像頭的數據,并編碼封裝成http協議的視頻流,默認推送到8080端口。Android/IOS/PC設備,連接到WiFi模塊的熱點后,打開控制軟件,會自動從8080端口獲取MJPG視頻流,并進行解碼、顯示。由此實現了WiFi智能小車的實時視頻傳輸功能。
OpenWrt 可以被描述為一個嵌入式的 Linux 發行版。(主流路由器固件有 dd-wrt,tomato,openwrt三類)對比一個單一的、靜態的系統,OpenWrt的包管理提供了一個完全可寫的文件系統,從應用程序供應商提供的選擇和配置,并允許您自定義的設備,以適應任何應用程序。
對于開發人員,OpenWrt 是使用框架來構建應用程序,而無需建立一個完整的固件來支持;對于用戶來說,這意味著其擁有完全定制的能力,可以用前所未有的方式使用該設備。
看看舵機怎么控制轉動速度
舵機的轉動速度取決于起始角度和目標角度的差,差別越大轉得越快,當接近時就放慢角度。所以沒有專門的函數控制轉速。但在大角度轉動時,你可以用程序把它設成幾個小角度遞進,這樣可以放慢速度。也通過delay進行慢速,但快速的話只有加高電壓了 。
現在在重申一下這個模塊的工作原理和使用方法
WiFi模塊通過采集掛載在USB接口的MJPG格式的攝像頭的數據,并編碼封裝成http協議的視頻流,默認推送到8080端口。Android/IOS/PC設備,連接到WiFi模塊的熱點
(wifi-robots.com開頭的SSID信號)后,打開控制軟件,會自動從8080端口獲取MJPG視頻流,并進行解碼、顯示。由此實現了WiFi智能小車的實時視頻傳輸功能。
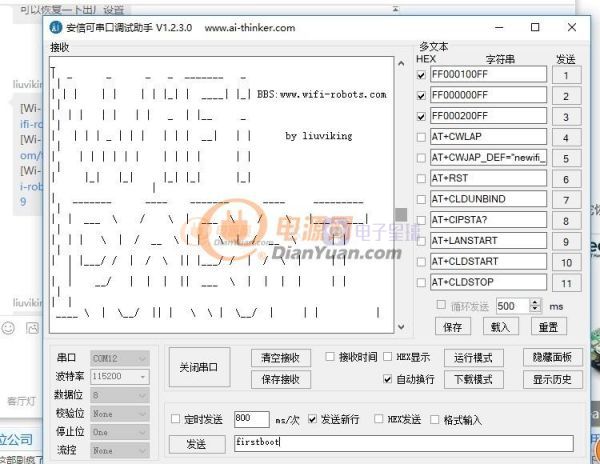
我們簡單恢復一下出廠設置就可以了,簡單說一下,用USB轉tll工具連接模塊配置好波特率(57600)和串口號一定注意先后順序
1:點擊打開串口,此時WIFI的狀態是沒有上電的
2:給WIFI上電此時要注意串口開始打印(很關鍵),
3:輸入命令firstboot就可以了