上次拆解了一個硬幣收集機器人
見貼http://www.daogou-taobao.cn/bbs/2424282.html
這次打算在這個殼上進(jìn)行DIY一個語音識別控制的機器人,加個底盤讓它可以跑起來。。。。。
后貼繼續(xù)更新,歡迎圍觀指導(dǎo)。。。。。

上次拆解了一個硬幣收集機器人
見貼http://www.daogou-taobao.cn/bbs/2424282.html
這次打算在這個殼上進(jìn)行DIY一個語音識別控制的機器人,加個底盤讓它可以跑起來。。。。。
后貼繼續(xù)更新,歡迎圍觀指導(dǎo)。。。。。
語音識別的模塊到手,今天測試了一下語音識別模塊的功能,識別還行,,,
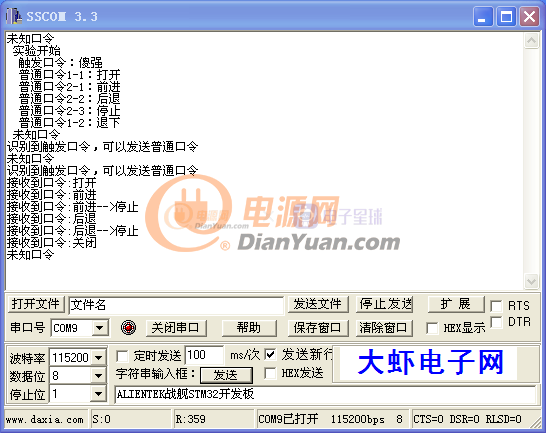
一天下來熟悉識別模塊,把模塊+驅(qū)動模塊+小車底盤=測試原型機,經(jīng)過幾次調(diào)試,今天終于可以拍個視頻發(fā)上來,比較粗糙 ,大家別見笑。。。。
,大家別見笑。。。。
發(fā)現(xiàn)視頻傳不上去 ,只能發(fā)兩張相片上去解解饞了
,只能發(fā)兩張相片上去解解饞了 。。。
。。。
測試小車模樣,功能測試語音識別模塊并不是最終的,最終是一個機器人 。
。

小米充電寶充當(dāng)電源,效果杠杠的,,O(∩_∩)O哈哈~

電機驅(qū)動模塊。最終會集成到一個板上,,,,
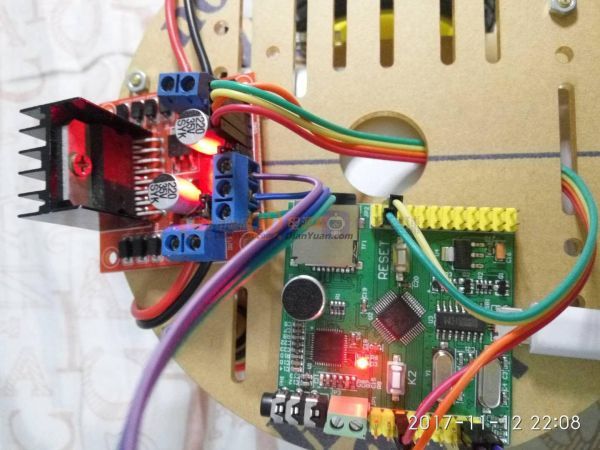
測試總結(jié),識別率有待提高,小車只用兩個輪子驅(qū)動,另外兩個是萬向輪,前進(jìn),后退的方向都不確定,穩(wěn)定性不高,下次使用四輪或者修改萬向輪為帶舵機的被動輪子,,,,,
自己錄制的小視頻,分享給大家:
后續(xù)待更新,,,,,,
前面都發(fā)了不少測試的視頻圖片,現(xiàn)在發(fā)些原理類的東西吧,,,
下面是這個語言識別控制小車的原理框圖,分兩部分
一部分是手持的語音識別部分,主要有語音識別芯片LD3220與STM32F103組成,識別到命令后通過RF433無線通信模塊進(jìn)行無線傳輸,此部分是使用小米充電寶進(jìn)行供電,,,
第二部分是在小車上或者說在機器人上,主要有STM32F030加L298N電機驅(qū)動模塊組成,接收指令使用hc-11的433Mhz的無線通信模塊進(jìn)行接收,電機可以控制做一下動作:
前進(jìn)(左右輪都正轉(zhuǎn))
后退(左右輪都反轉(zhuǎn))
左轉(zhuǎn)(左輪停止,右輪正轉(zhuǎn))
右轉(zhuǎn)(左輪正轉(zhuǎn),右輪停止)
停止(左右輪停止)
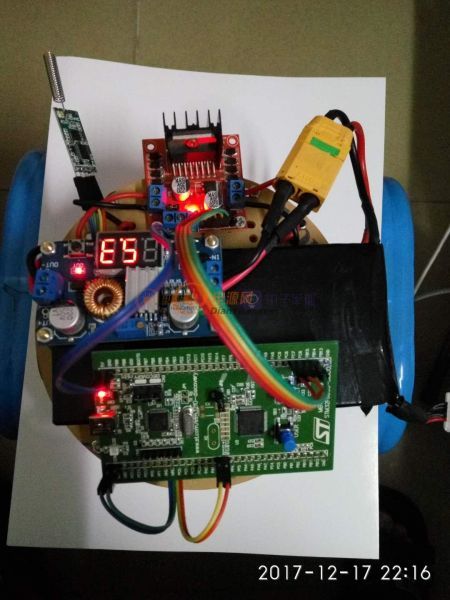
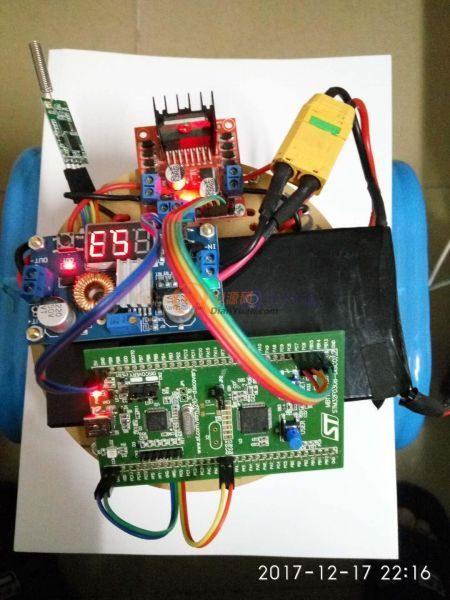
此部分供電是使用4S的鋰電池組再使用5A的DC-DC 降壓模塊,最開始還是使用小米電池供電,但是在電機轉(zhuǎn)動的時候電壓被拉低了,HC-11模塊在收發(fā)時候收到影響,有時候會接受不到指令,所以最后改為使用電池組供電,,,,,

大家是否注意到了兩個控制芯片一個是F103,一個是F030兩個系列的芯片,在代碼上兩個芯片進(jìn)行切換之間還得多多修煉。。。。

最下面黑色的是電池組,最上面的是DCDC模塊,最前面的是L298N電機控制模塊,前左邊是433Mhz RF模塊,上面最后的藍(lán)色是STM32F303-discovery開發(fā)板,主要是否控制,最下方就是圓形的小車咯。

后期更新調(diào)試的bug以及修改辦法,,,,
先說說,RF 433Mhz無線模塊調(diào)試吧,,,,
#
一開始是使用LD3220語音識別模塊在小車上,但是由于小車運動起來噪聲很大,主要是電機出來的減速機聲音很大,再有就是叫口令的時候要跟著小車跑,所以就打算這使用無線模塊進(jìn)行傳輸指令
一看公司上次做實驗還剩下有幾個無線模塊,HC-12 433Mhz RF模塊。所以就拿來測試一下,
@
@
######################################囧途一###################################
沒看規(guī)格書,只知道可以透傳,往串口送數(shù)據(jù)就可以傳輸出去,所以就把收發(fā)都掛在一個stm32開發(fā)板上,最近距離進(jìn)行測試,以為這樣就不會有其他的因素影響了,只需要測試程序OK就可以收到數(shù)據(jù),但是折騰了兩個晚上,一點進(jìn)展都沒有
???為啥???
再去公司問了一下上次使用的同事,他也不知道,只給我一個購買的淘寶地址,好吧,哥自己動手豐衣足食,,,,,,
上去一看,傻眼了,人家要求使用距離是1-400米。也就是最小的通信距離不能小于1m。

大悟,就弄了一條USB延長線,再買了一個USB轉(zhuǎn)串口TTL小模塊。
一端接電腦,一端接到開發(fā)板上,開發(fā)板程序不停發(fā)送數(shù)據(jù),使用中斷進(jìn)行接收,,,,,
@
@
######################################囧途二###################################
到上面的時候,電腦使用的串口調(diào)試工具是可以接收到開發(fā)板發(fā)過來的數(shù)據(jù),但是問題又來了
@
@
接收沒問題,但是我從串口已發(fā)送數(shù)據(jù),串口就死掉,而且再也收不到數(shù)據(jù)了,,,,,
一直沒搞懂是什么問題???? 難道是開發(fā)板的接收中斷處理有問題嗎?
難道是開發(fā)板的接收中斷處理有問題嗎?
再回頭,直接把開發(fā)板的串口1和串口3的Tx1接到RX3中,接收處理中斷也正常啊,但是為啥一接上無線模塊就不行呢?
傷腦筋啊,
問度娘啊,
問同事啊,
折騰 啊,,
最后懷疑是不是供電不足啊,USB轉(zhuǎn)232的模塊輸出的3.3V供電管腳是不是供電不足,在發(fā)送數(shù)據(jù)的時候?qū)е翿F模塊重啟了,,,,,,
果斷換掉3.3V,直接轉(zhuǎn)接5V。(USB輸出5V的能力為0.5A)這次應(yīng)該沒問題了吧,接上去,收正常,發(fā),關(guān)鍵時刻馬上就要到了,
能好嗎?
期待嗎?
進(jìn)中斷了,燈亮了,
收到中斷回饋的數(shù)據(jù)了,
我CNM的,容我罵句粗口,折騰了這么久,居然是USB轉(zhuǎn)232的3.3V供電不足。。。。。。
¥¥¥¥¥¥¥¥¥
打下這兩個攔路虎以后,后面的無線調(diào)試就基本很順利了,也沒有太大的問題咯。。。。
發(fā)兩個圖,看看


下圖是HC-12 無線模塊的產(chǎn)品規(guī)格書

 頂帖頂帖
頂帖頂帖







