
“三十年河東,三十年河西”,想不到我又做回了老本行,搞起來了無刷電機驅動,回頭一望還都是老熟人,,老的客戶,老的供應商,還有一群老同事。先來干什么呢?先來溫故知新:
下班了回家再寫》》》》
“三十年河東,三十年河西”,想不到我又做回了老本行,搞起來了無刷電機驅動,回頭一望還都是老熟人,,老的客戶,老的供應商,還有一群老同事。先來干什么呢?先來溫故知新:
下班了回家再寫》》》》
早上先說步進電機:
步進電機是將電脈沖信號轉變為角位移或線位移的開環控制元件。在非超載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響,即給電機加一個脈沖信號,電機則轉過一個步距角。這一線性關系的存在,加上步進電機只有周期性的單步誤差和累積誤差等特點。使得在速度、位置等控制領域用步進電機來控制變的非常的簡單。
雖然步進電機已被廣泛地應用,但步進電機并不能象普通的直流電機、交流電機在常規下使用。步進電機必須由雙環形脈沖信號、功率驅動電路等組成控制系統方可使用。因此用好步進電機卻非易事,它涉及到機械、電機、電子及計算機等許多專業知識。
 占位樓層
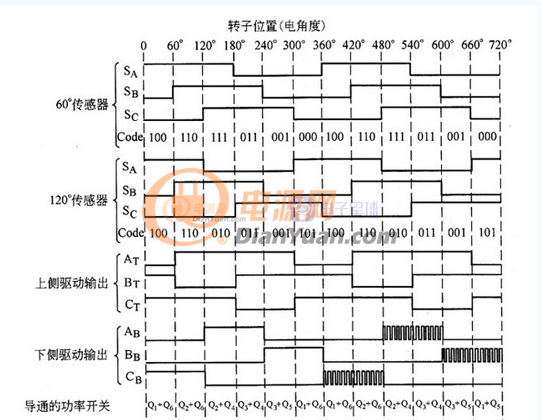
占位樓層我用的還是安森美的MC33035芯片,它需要帶霍爾位置信號才能工作的直流無刷電機驅動控制。供6個輸出脈沖分為上下兩組,每組分為 U,V,W三項。各驅動一個MOS管共六只管子,上組可以用NPN的功率晶體管,下組可以用P溝道的MOSFET。
 沙發
沙發
 沒有時間寫東西了!
沒有時間寫東西了!


