1. buck
整體而言384x構成Buck電路是相對麻煩的。但很多時候,由于其足夠的廉價和成熟,工程師們愿意增加很多外圍器件來克服這些問題。
根據開關管所在的位置,Buck電路可以分為低邊Buck和高邊Buck。對于低邊Buck,384x的驅動及電流采樣電路很好做,但由于輸入輸出公共點是Vin而非GND,導致電壓反饋電路比較麻煩,通常需要一個光耦;對于高邊Buck,384x的驅動及電流采樣變得相對復雜,為了驅動高邊管,通常需要一顆自舉的高邊驅動IC,為了采樣到高邊管的峰值電流,則通常需要外加一個電流互感器。
1.1 低邊buck
這里首先給出一個3843用作低邊Buck的簡化電路圖,指標擬定如下:
輸入:9--20VDC
輸出:5V/3A
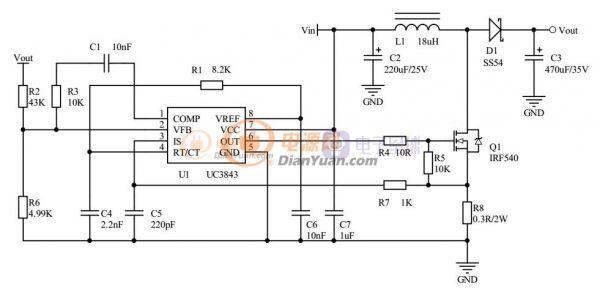
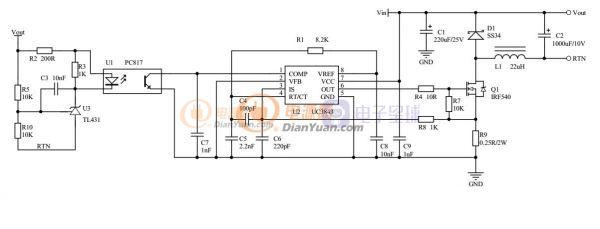
電路原理圖如下:
為了實現輸入輸出不共地輸出電壓的反饋,使用TL431+光耦作為反饋,384x內部的誤差放大器沒有使用。為了避免低壓輸入下的次諧波振蕩問題,使用C4為電流采樣端注入斜坡信號,充當斜率補償。
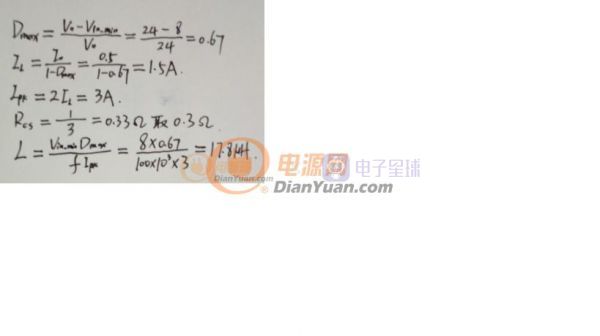
按照圖中R1、C5取值,開關頻率約100KHz,按照以下公式,Vin取最大值20V,detaIL取電感平均電流即輸出電流的50%,得到L=25uH,取22uH
電感峰值電流約為1.25Io=3.75A,取IC限流點4A

1.2 高邊buck
接下來我們來看一個高邊buck,輸入輸出規格與上面的低邊buck相同。
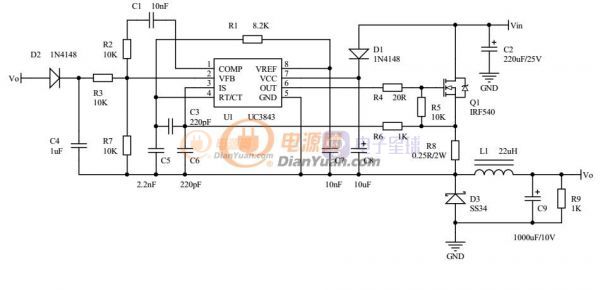
前面提到,384x這類低邊驅動的IC要做高邊buck,面臨電流采樣和驅動問題。上圖采用浮地驅動的形式可以規避這兩個問題。在D3續流期間,輸入電壓通過D1為C8充電,輸出電壓通過D2為C4充電,由于IC本身的功耗及電壓采樣部分電流很小,在開關管開通期間,C4和C8上的電壓比較穩定,分別近似等于輸出電壓和輸出電壓。
這種控制方式廣泛應用于高壓buck,例如我們熟知的PI的LNK30x系列以及ST的Viper系列。這種電路的缺點非常明顯,一方面浮地導致IC抗干擾能力差,一方面輸出電壓不能精確控制。